Stateczność konstrukcji i jej elementów – taka ich właściwość, która polega na zachowywaniu przez nie trwałej równowagi statycznej pod działaniem obciążenia zewnętrznego[1][2][3]. Elementy konstrukcji (pręty, tarcze, powłoki) tracą stateczność wtedy, kiedy ich obciążenia przekroczą tzw. wartości krytyczne[4][5]. Utrata stateczności elementu konstrukcji jest zazwyczaj równoznaczna z utratą stateczności całej konstrukcji. Zjawiskiem z tej dziedziny badanym najwcześniej przez Leonharda Eulera (jeszcze w wieku XVIII), było tzw. wyboczenie prętów ściskanych w kratownicach statycznie wyznaczalnych, mostów stalowych. Na skutek braku wiedzy z tej dziedziny, wystąpiło wiele katastrof mostów stalowych.
Konstrukcja zachowująca stateczność pod działaniem obciążenia zewnętrznego ma tę istotną właściwość, że wychylona z położenia trwałej równowagi statycznej wraca samorzutnie do tego samego położenia. Temu powrotowi zazwyczaj towarzyszą jej swobodne drgania tłumione o podstawowej (najniższej) częstości drgań własnych. Częstość ta maleje wraz ze wzrostem obciążenia i przybiera wartość zerową, gdy to obciążenie osiąga wartość krytyczną. Dotychczasowy, przedkrytyczny stan trwałej równowagi statycznej staje się chwiejny co powoduje, że pojawia się bardzo bliski, sąsiedni, pokrytyczny stan niestatecznej równowagi układu. Ten stan sąsiedni charakteryzuje się tym, że pojawiają się, szybko narastające, dodatkowe przemieszczenia jakościowo różne od dotychczasowych i prowadzące do powstania stref zniszczenia materiału konstrukcyjnego. Pojawienie się tej jakościowo nowej formy równowagi nazywane jest jej bifurkacją. Istnieją wtedy dwie formy równowagi, przy czym stara, przedkrytyczna, staje się niestateczna[4].
Analiza stateczności stanu równowagi
Analiza stateczności stanu równowagi układu[1][4][6] wymaga badania warunków stacjonarności jego energii potencjalnej W analizie tej korzysta się z zasady minimum energii potencjalnej. Jeżeli stan układu (jego konfiguracja) jest opisany za pomocą skończonej liczby stopni swobody, to energia układu jest funkcją zmiennych niezależnych i warunki konieczne istnienia tego minimum przybierają postać




Jeżeli stan układu opisany jest za pomocą pewnego zbioru funkcji to badanie jego stateczności wymaga analizy stacjonarności odpowiedniego funkcjonału.

Proste przykłady bifurkacji
Uproszczone modele pręta ściskanego
Przykład 1
W celu zilustrowania zjawiska bifurkacji rozważymy układ mechaniczny (rys. 1a) składający się z pionowego, nieskończenie sztywnego i idealnie prostego pręta AB o długości Pręt na dolnym końcu podparty jest przegubowo nieprzesuwnie i zamocowany sprężyście za pomocą sprężyny o sztywności Górny koniec pręta obciąża siła skierowana pionowo w dół i działająca idealnie wzdłuż osi pręta.

![{\displaystyle L\;\mathrm {[m]} .}](../I/35b8f4c3b8116bc91f486c608f143d8df2eb8ed1.svg)
![{\displaystyle k\;\mathrm {[kNm/rad]} .}](../I/c731368a5bffb310bc62c8c4593dd3bc88d632e6.svg)
![{\displaystyle P\;\mathrm {[kN]} }](../I/6307f0f2aa22bbf35616fe9782bb532c3269b0f5.svg)
Energia potencjalna układu, wychylonego o kąt od pionu (rys. 1b), wyraża się wzorem
![{\displaystyle \alpha \;\mathrm {[rad]} }](../I/43f1846972b258952fc415f863d18cceba7b1520.svg)
![{\displaystyle U(\alpha )={\frac {1}{2}}k\alpha ^{2}-P\Delta ={\frac {1}{2}}k\alpha ^{2}-PL[1-\cos(\alpha )],}](../I/228ede321e6a3bd03e6f78654f476bd5998f7bc2.svg)
a warunek jej stacjonarności przybiera postać
- (a1)

albo
- (a2)

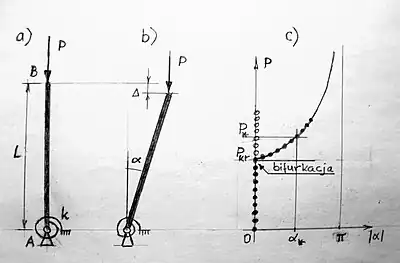


Układ znajduje się w stanie równowagi (trwałej albo chwiejnej) tylko wtedy, gdy jest pierwiastkiem równania (a2). Równanie to może mieć dwa pierwiastki:


- 1) – określa taki stan równowagi, kiedy pręt znajduje się w pozycji pionowej, niezależnie od wartości działającej siły
- 2) drugi pierwiastek istnieje tylko wtedy, gdy




to zaś jest możliwe, gdy (rys. 2d).
![{\displaystyle \lambda \in [0,1]}](../I/010c0ee88963a09590dd07393d288edd83786b91.svg)
Ze wzoru (a2) wynika, że ten drugi pierwiastek istnieje tylko wtedy, gdy gdzie jest krytyczną wartością obciążenia Przy takim obciążeniu pojawia się rozdwojenie (bifurkacja) stanów równowagi. Ze wzrostem obciążenia te dwa stany oddalają się od siebie (rys. 1c).
![{\displaystyle P\in [P_{kr},\infty ],}](../I/48de1362801e6c3691ff854b5329142018bc5f4b.svg)


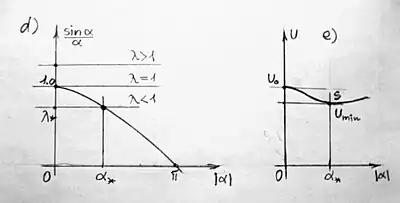
Z pełniejszej analizy wynika, że stan określony przez jest stanem równowagi chwiejnej, zaś stan – stanem równowagi trwałej. Na rys. 2e pokazano zależność energii potencjalnej układu od kąta wychylenia Stanowi równowagi trwałej odpowiada minimum tej energii.




Przykład 2

Zjawisko utraty stateczności pręta ściskanego przeanalizujemy teraz na modelu składającym się z dwóch pionowych członów o jednakowej długości (rys. 3a). Układ w stanie równowagi utrzymują dwie sprężyny o jednakowej sztywności Do opisu jego konfiguracji wprowadzimy dwa kąty i (rys. 3b).




Ograniczając rozważania tylko do małych kątów, pionowe przemieszczenie punktu przyłożenia siły (rys. 3b) zapiszemy wzorem



Energia potencjalna układu wychylonego od pionu (rys. 3b) wynosi

a warunki konieczne istnienia jej minimum przybierają postać


albo
(b1)

(b2)

Ten układ równań ma rozwiązania nietrywialne tylko wtedy, gdy

Wyznacznik ma wartość zerową, gdy przybiera wartości


lub

Z punktu widzenia stateczności modelu interesująca jest tylko większa wartość gdyż odpowiada ona mniejszej wartości krytycznej działającego obciążenia Wartość ta wynosi



Rzeczą interesującą jest porównanie obliczonej wartości z wynikiem otrzymanym w przykładzie 1. Porównanie to wymaga jednak przyjęcia, że oba modele mają tę samą długość całkowitą Jeżeli w tym celu w powyższym wzorze podstawimy zamiast to otrzymamy





Mniejsza wartość obciążenia krytycznego dla modelu dwuczłonowego wynika stąd, że model ten jest mniej sztywny od jednoczłonowego.
W przypadku, gdy obciążenie modelu osiągnie wartość krytyczną przedkrytyczny stan (forma) równowagi, określony przez kąty przestaje być stateczny i pojawia się, nieskończenie bliski, sąsiedni stan równowagi trwałej. Stan ten nazywany jest formą utraty stateczności i może być określony na podstawie równań (b1,b2) po podstawieniu w nich Z drugiego równania otrzymujemy



i na tej podstawie możemy narysować formę utraty stateczności (rys. 3c).
Uproszczony model pręta zginanego
Przykład 3
Rozważymy uproszczony model belki wspornikowej płasko zginanej względem osi pionowej (rys. 4a). Belka ma postać nieskończenie sztywnej cienkiej „płytki” o kształcie prostokąta wydłużonego w kierunku osi Płytka ta jest zamocowana sprężyście na końcu A za pomocą dwu sprężyn o sztywnościach i Sprężyna o sztywności modeluje sztywność skręcania belki wokół osi zaś sprężyna o sztywności – sztywność zginania względem osi Zamocowanie na końcu A przyjmiemy jako nieskończenie sztywne względem osi Model jest obciążony pionową siłą działającą na końcu swobodnym w punkcie B położonym na osi










Konfigurację (stan) układu, w małym otoczeniu punktu opiszemy jednoznacznie za pomocą dwu kątów i (rys. 4b). Pierwszy z nich określa obrót modelu wokoło osi (rys. 4d), drugi zaś – wokoło osi (rys. 4c). Punkt B przyłożenia siły doznaje przemieszczenia o poziomej składowej (rys. 4c) i pionowej (rys. 4d).





Energia potencjalna układu wyraża się wzorem

Warunki konieczne stacjonarności energii mają postać układu równań
- albo


- albo


Ten układ równań ma dwa rozwiązania:
- 1) trywialne i niezależnie od wartości działającego obciążenia
- 2) nietrywialne, które istnieje tylko wtedy, gdy spełniony jest warunek


Z warunku tego wynika krytyczna wartość obciążenia
- oraz rozwiązanie


Uwagi ogólne
Najprostszym i najczęściej występującym inżynierskim przypadkiem utraty stateczności jest eulerowskie wyboczenie pręta o osi idealnie prostoliniowej, poddanego czystemu ściskaniu osiowemu. Takie ściskanie może być wywołane dwójką sił skupionych, przyłożonych na przeciwległych jego końcach i działających idealnie wzdłuż jego osi. Utrata stateczności polega w tym przypadku na przejściu pręta w jego pokrytyczny stan giętny (zgięciowy) w płaszczyźnie prostopadłej do tej osi przekroju, względem której jego główny centralny moment bezwładności jest najmniejszy.
Równie często występuje utrata stateczności przez zwichrzenie, podczas zginania w płaszczyźnie pionowej, belek o przekrojach zbliżonych do postaci wąskich pionowych prostokątów. W przedkrytycznym stanie równowagi, pod wpływem działającego obciążenia, oś ugiętej belki leży dokładnie w płaszczyźnie pionowej i opisana jest równaniem Bifurkacja polega w tym przypadku na pojawieniu się dwu wzajemnie sprzężonych przemieszczeń:


- ugięcia w płaszczyźnie poziomej oraz
- kąta obrotu (zwichrzenia) przekroju względem osi



Belka podlegająca w stanie przedkrytycznym płaskiemu zginaniu względem osi (tzn. w płaszczyźnie ) zaczyna w stanie pokrytycznym dodatkowo wyginać się względem osi (tzn. w płaszczyźnie ) i zaczyna stawać się wichrowata, czemu towarzyszy obrót jej przekrojów wkoło osi wywołany skręcaniem belki. Istota tego zwichrowania polega na tym, że płaszczyzna przekształca się w pewną powierzchnię prostokreślną zawierającą odkształconą oś belki zwichrzonej.

Analiza stateczności polega na poszukiwaniu sąsiedniego stanu równowagi, tego który pojawia się w momencie utraty stateczności. To poszukiwanie sprowadza się do badania niezerowych rozwiązań odpowiednich równań różniczkowych.
Wyboczenie pręta ściskanego osiowo
Skupimy teraz uwagę na idealnym (tzn. pozbawionym wszelkich imperfekcji) modelu pręta ściskanego, pokazanym na rys. 5a. Analizę wyboczenia przeprowadzimy w ramach teorii Eulera, zakładając dodatkowo, że . Dzięki temu założeniu wyeliminujemy z rozważań przemieszczenia pierwszego rodzaju występujące w stanie przedkrytycznym (skrócenie pręta), które nie mają żadnego wpływu na obliczenie wartości krytycznej działającego obciążenia.

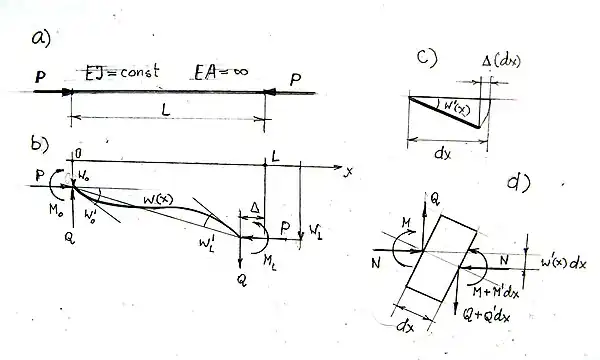
Dzięki założeniu, że konfigurację pręta opisywać będzie tylko jedna funkcja nazywana jego linią ugięcia. Funkcja ta opisuje przemieszczenia drugiego rodzaju (pokrytyczne), które w stanie przedkrytycznym są równe zeru, tzn. (rys. 5a), a w stanie krytycznym (gdy ) przedstawiają postać utraty stateczności.




Energię układu odkształconego (rys. 5b) można zapisać w postaci funkcjonału
- (a)
![{\displaystyle {}\quad U[w]={\frac {1}{2}}\int _{0}^{L}EJ\left[w''(x)\right]^{2}dx-P\Delta ,}](../I/301a790dcd68e4bae21586d6cee101d834bf42b2.svg)
![{\displaystyle {}\qquad \Delta ={\frac {1}{2}}\int _{0}^{L}\left[w'(x)\right]^{2}dx.}](../I/58786a0fc798a78e9e556ef2bcae6dfb1e0c709e.svg)
Przemieszczenie końca pręta (rys. b) otrzymujemy przez całkowanie efektów pokazanych na rys. 5c. Efekty te o wielkości
![{\displaystyle \Delta (dx)=dx-dx\cdot \cos \left[w'(x)\right]\approx {\frac {1}{2}}\left[w'(x)\right]^{2}dx}](../I/beca4584c9ad7c04b72b3901c3af7b2da2470683.svg)
występują w każdym elementarnym odcinku pręta o długości i pochodzą od ich obrotów o kąt związany z uginaniem się jego nieściśliwej osi w płaszczyźnie (rys. 5b).



Równanie równowagi pręta otrzymamy jako warunek stacjonarności funkcjonału (a) energii potencjalnej układu. Wariację tego funkcjonału zapiszemy zgodnie z zasadami rachunku wariacyjnego, w postaci
![{\displaystyle U[w]}](../I/9bd229ea79e5b5327495cb4d38bd9cd63fd90051.svg)
![{\displaystyle \delta U[w]=\int _{0}^{L}\left[EJw''(x)\delta w''(x)-Pw'(x)\delta w'(x)\right]dx.}](../I/255190e109eb7963a3ab860a9edee8fae00b2ec4.svg)
Po scałkowaniu przez części otrzymujemy
![{\displaystyle \delta U(w)=\int _{0}^{L}\!\!\left\{\left[\left(EJw''(x)\right)''+Pw''(x)\right]\delta w(x)\right\}dx+}](../I/db5cd0ef66f2f3a5c4aea447d2dcf627b4da8c3c.svg)
![{\displaystyle {}\qquad +\left.\left[-M(x)\delta w'(x)+Q(x)\delta w(x)\right]\right|_{0}^{L},}](../I/8b026ac6eb2a9652ec65503fcb2d7ca683242cd8.svg)
gdzie:

![{\displaystyle Q(x)=M'(x)-Pw'(x)=-\left\{\left[EJw''(x)\right]'+Pw'(x)\right\}.}](../I/4180bbfffa64c350cba2fb4c5222177359027a73.svg)
Funkcjonał jest stacjonarny, gdy spełnione jest jego równanie Eulera
![{\displaystyle \left[EJw''(x)\right]''+Pw''(x)=0}](../I/aa8645eca4fa9e47a77499c67baeac17106daa15.svg)
przy dowolnych warunkach brzegowych.
Przykład 4
Pokrytyczny stan równowagi ściskanego pręta pryzmatycznego opisuje równanie


gdzie:
- – linia ugięcia pręta wyboczonego (forma utraty stateczności),
- – mniejsza ze sztywności przekroju na zginanie,
- – długość pręta,
- – siła ściskająca pręt.

Równanie to ma dwa rozwiązania
- – opisujące prostoliniowy stan przedkrytyczny pręta i

opisujące jego nieskończenie bliski stan krytyczny.
Stałe wyznacza się na podstawie warunków podparcia pręta. I tak na przykład dla pręta podpartego przegubowo na obu końcach otrzymuje się oraz




Rozwiązaniem tego równania jest

Najniższa, niezerowa wartość obciążenia krytycznego określona jest przez skąd


Stan krytyczny (formę utraty stateczności) opisuje funkcja

Występująca w powyższych wzorach wielkość jest mniejszym z dwóch głównych centralnych momentów bezwładności poprzecznego przekroju pręta. Określa ona płaszczyznę, w której następuje wyboczenie (forma utraty stateczności).

Na podkreślenie zasługuje fakt, że w opisanym przypadku bifurkacja stanu równowagi następuje od zerowego stanu przedkrytycznego co w istotny sposób upraszcza obliczenia.

Zwichrzenie belki płasko zginanej
Przykład 5
W tym przypadku sytuacja jest trochę bardziej złożona[7]. Celem jej uproszczenia rozważymy tylko przypadek szczególny obciążenia belki pryzmatycznej ( ) dwójką momentów działających na jej końcach, w płaszczyźnie pionowej Linia ugięcia stanu przedkrytycznego opisana jest równaniem







Pokrytyczny stan przemieszczenia powstaje w wyniku bifurkacji stanu przedkrytycznego i pojawieniu się dwu nowych przemieszczeń (ugięcia w płaszczyźnie i obrotu względem osi ) opisanych przez równania

Różniczkując i eliminując otrzymuje się równanie dla wyznaczenia kąta obrotu przekroju



Rozwiązanie równania ma postać

Krytyczną wartość obciążenia można obliczyć na podstawie konkretnych warunków podparcia. I tak na przykład dla belki widełkowo podpartej na obu końcach, jest skąd wynika warunek dla obciążenia krytycznego



Najniższa wartość krytyczna obciążenia wynosi

Formę utraty stateczności opisują funkcje

Przypisy
- 1 2 S.P. Timoshenko, J.M. Gere, Teoria stateczności sprężystej, Arkady, Warszawa 1963.
- ↑ N.M. Bielajew, Wytrzymałość materiałów, Wydawnictwo MON, Warszawa 1954, rozdz. część IX.
- ↑ S. Piechnik, Wytrzymałość materiałów, PWN, Warszawa 1980, s. 304.
- 1 2 3 J. Naleszkiewicz, Zagadnienia stateczności sprężystej, PWN, Warszawa 1958.
- ↑ R. Kurowski, Z. Parszewski, Zbiór zadań z wytrzymałości materiałów, PWN, Warszawa 1962.
- ↑ B. Olszowski, M. Radwańska, Mechanika budowli, t. 1–2, Kraków 2010, Wyd. Politechniki Krakowskiej.
- ↑ Jak w p. 4, s. 224.