

Docking and berthing of spacecraft is the joining of two space vehicles. This connection can be temporary, or partially permanent such as for space station modules.
Docking specifically refers to joining of two separate free-flying space vehicles.[1][2][3][4] Berthing refers to mating operations where a passive module/vehicle is placed into the mating interface of another space vehicle by using a robotic arm.[1][3][4] Because the modern process of un-berthing requires more crew labor and is time-consuming, berthing operations are unsuited for rapid crew evacuations in the event of an emergency.[5]
History
Docking

Spacecraft docking capability depends on space rendezvous, the ability of two spacecraft to find each other and station-keep in the same orbit. This was first developed by the United States for Project Gemini. It was planned for the crew of Gemini 6 to rendezvous and manually dock under the command of Wally Schirra, with an uncrewed Agena Target Vehicle in October 1965, but the Agena vehicle exploded during launch. On the revised mission Gemini 6A, Schirra successfully performed a rendezvous in December 1965 with the crewed Gemini 7, approaching to within 0.3 metres (1 ft), but there was no docking capability between two Gemini spacecraft. The first docking with an Agena was successfully performed under the command of Neil Armstrong on Gemini 8 on March 16, 1966. Manual dockings were performed on three subsequent Gemini missions in 1966.
The Apollo program depended on lunar orbit rendezvous to achieve its objective of landing men on the Moon. This required first a transposition, docking, and extraction maneuver between the Apollo command and service module (CSM) mother spacecraft and the Lunar Module (LM) landing spacecraft, shortly after both craft were sent out of Earth orbit on a path to the Moon. Then after completing the lunar landing mission, two astronauts in the LM had to rendezvous and dock with the CSM in lunar orbit, in order to be able to return to Earth. The spacecraft were designed to permit intra-vehicular crew transfer through a tunnel between the nose of the Command Module and the roof of the Lunar Module. These maneuvers were first demonstrated in low Earth orbit on March 7, 1969, on Apollo 9, then in lunar orbit in May 1969 on Apollo 10, then in six lunar landing missions, as well as on Apollo 13 where the LM was used as a rescue vehicle instead of making a lunar landing.
Unlike the United States, which used manual piloted docking throughout the Apollo, Skylab, and Space Shuttle programs, the Soviet Union employed automated docking systems from the beginning of its docking attempts. The first such system, Igla, was successfully tested on October 30, 1967 when the two uncrewed Soyuz test vehicles Kosmos 186 and Kosmos 188 docked automatically in orbit.[6][7] This was the first successful Soviet docking. Proceeding to crewed docking attempts, the Soviet Union first achieved rendezvous of Soyuz 3 with the uncrewed Soyuz 2 craft on October 25, 1968; docking was unsuccessfully attempted. The first crewed docking was achieved on January 16, 1969, between Soyuz 4 and Soyuz 5.[8] This early version of the Soyuz spacecraft had no internal transfer tunnel, but two cosmonauts performed an extravehicular transfer from Soyuz 5 to Soyuz 4, landing in a different spacecraft than they had launched in.[9]
In the 1970s, the Soviet Union upgraded the Soyuz spacecraft to add an internal transfer tunnel and used it to transport cosmonauts during the Salyut space station program with the first successful space station visit beginning on 7 June 1971, when Soyuz 11 docked to Salyut 1. The United States followed suit, docking its Apollo spacecraft to the Skylab space station in May 1973. In July 1975, the two nations cooperated in the Apollo-Soyuz Test Project, docking an Apollo spacecraft with a Soyuz using a specially designed docking module to accommodate the different docking systems and spacecraft atmospheres.
Beginning with Salyut 6 in 1978, the Soviet Union began using the uncrewed Progress cargo spacecraft to resupply its space stations in low earth orbit, greatly extending the length of crew stays. As an uncrewed spacecraft, Progress rendezvoused and docked with the space stations entirely automatically. In 1986, the Igla docking system was replaced with the updated Kurs system on Soyuz spacecraft. Progress spacecraft received the same upgrade several years later.[6]: 7 The Kurs system is still used to dock to the Russian Orbital Segment of the International Space Station.
Berthing
.jpg.webp)
Berthing of spacecraft can be traced at least as far back as the berthing of payloads into the Space Shuttle payload bay.[10] Such payloads could be either free-flying spacecraft captured for maintenance/return, or payloads temporarily exposed to the space environment at the end of the Remote Manipulator System. Several different berthing mechanisms were used during the Space Shuttle era. Some of them were features of the Payload Bay (e.g., the Payload Retention Latch Assembly), while others were airborne support equipment (e.g., the Flight Support Structure used for HST servicing missions).
Hardware
Androgyny
Docking/berthing systems may be either androgynous (ungendered) or non-androgynous (gendered), indicating which parts of the system may mate together.
Early systems for conjoining spacecraft were all non-androgynous docking system designs. Non-androgynous designs are a form of gender mating[2] where each spacecraft to be joined has a unique design (male or female) and a specific role to play in the docking process. The roles cannot be reversed. Furthermore, two spacecraft of the same gender cannot be joined at all.
Androgynous docking (and later androgynous berthing) by contrast has an identical interface on both spacecraft. In an androgynous interface, there is a single design which can connect to a duplicate of itself. This allows system-level redundancy (role reversing) as well as rescue and collaboration between any two spacecraft. It also provides more flexible mission design and reduces unique mission analysis and training.[2]
List of mechanisms/systems
| Image | Name | Method | Internal crew transfer | Notes | Type |
|---|---|---|---|---|---|
 |
Gemini Docking Mechanism | Docking | No | Allowed the Gemini Spacecraft (active) to dock to the Agena target vehicle (passive). | Non-Androgynous |
 |
Apollo Docking Mechanism | Docking | Yes | Allowed the Command/Service Module (active) to dock to the Apollo Lunar Module[11] (passive) and the Skylab space station (passive). Was used to dock to the Docking Module adapter (passive) during the Apollo–Soyuz Test Project (ASTP), which enabled the crew to dock with a Soviet Soyuz 7K-TM spacecraft. It had a circular pass through diameter of 810 mm (32 in).[12][13] | Non-Androgynous |
 |
Original Russian probe and drogue docking system | Docking | No | The original Soyuz probe-and-drogue docking system was used with the first generation Soyuz 7K-OK spacecraft from 1966 until 1970 in order to gather engineering data as a preparation for the Soviet space station program. The gathered data were subsequently used for the conversion of the Soyuz spacecraft – which was initially developed for the Soviet crewed lunar program – into a space station transport craft.[1]
A first docking with two uncrewed Soyuz spacecraft – the first fully automated space docking in the history of space flight – was made with the Kosmos 186 and Kosmos 188 missions on October 30, 1967. |
Non-Androgynous |
 |
Kontakt docking system | Docking | No | Intended to be used in the Soviet crewed lunar program to allow the Soyuz 7K-LOK ("Lunar Orbital Craft", active) to dock to the LK lunar lander (passive).[14] | Non-Androgynous |
  |
SSVP-G4000 | Docking | Yes | SSVP-G4000 is also known more vaguely as the Russian probe and drogue or simply the Russian Docking System (RDS).[1][15] In Russian, SSVP stands for Sistema Stykovki i Vnutrennego Perekhoda, literally "System for docking and internal transfer".[16]
It was used for the first docking to a space station in the history of space flight, with the Soyuz 10 and Soyuz 11 missions that docked to the Soviet space station Salyut 1 in 1971.[1][15] The docking system was upgraded in the mid-1980s to allow the docking of 20 ton modules to the Mir space station.[16] It has a circular transfer passage that has a diameter of 800 mm (31 in) and is manufactured by RKK Energiya.[3][4][16] The probe-and-drogue system allows visiting spacecraft using the probe docking interface, such as Soyuz, Progress and ESA's ATV spacecraft, to dock to space stations that offer a port with a drogue interface, like the former Salyut and Mir or the current ISS space station. There are a total of four such docking ports available on the Russian Orbital Segment of ISS for visiting spacecraft; These are located on the Zvezda, Rassvet, Pirs and Poisk modules.[16] Furthermore, the probe-and-drogue system was used on the ISS to dock Rassvet semipermanently to Zarya.[1] |
Non-Androgynous |
 |
APAS-75 | Docking | Yes | Used on the Apollo-Soyuz Test Project Docking Module and Soyuz 7K-TM. There were variations in design between the American and Soviet version but they were still mechanically compatible. | Androgynous |
  |
APAS-89 | Docking | Yes | Used on Mir (Kristall,[14][17] Mir Docking Module), Soyuz TM-16,[14][17] Buran (was planned).[17] It had a circular transfer passage with a diameter of 800 mm (31 in).[1][3][4] | Androgynous (Soyuz TM-16), Non-Androgynous (Kristall,[18] Mir Docking Module[19]) |
  |
APAS-95 | Docking | Yes | It was used for Space Shuttle dockings to Mir and ISS,[17] On the ISS, it was also used on Zarya module, Russian Orbital Segment to interface with PMA-1 on Unity module, US Orbital Segment[20] It has a diameter of 800 mm (31 in).[1][3][4] Described as "essentially the same as" APAS-89.[17] | Androgynous (Shuttle, Zarya and PMA-1[1]), Non-Androgynous (PMA-2 and PMA-3)[1] |
  |
SSVP-M8000 (Hybrid Docking System) | Docking | Yes | SSVP-M8000 or more commonly known as "hybrid", is a combination of a "probe and drogue" soft-dock mechanism with an APAS-95 hard-dock collar.[16] It began to be manufactured in 1996.[16] It is manufactured by RKK Energiya.[16]
Used on ISS (connects Zvezda to Zarya, Pirs, Poisk[1] Nauka[21] and Nauka to Prichal) |
Non-Androgynous |
  |
Common Berthing Mechanism | Berthing | Yes | Used on ISS (USOS), MPLMs, HTV, SpaceX Dragon 1,[22] Cygnus. The standard CBM has a pass through in the shape of a square with rounded edges and has a width of 1,300 mm (50 in).[4] The smaller hatch that Cygnus uses results in a transfer passage of the same shape but has a width of 940 mm (37 in).[23] | Non-Androgynous |
 |
Chinese Docking Mechanism | Docking | Yes | Used by Shenzhou spacecraft, beginning with Shenzhou 8, to dock to Chinese space stations. The Chinese docking mechanism is based on the Russian APAS-89/APAS-95 system; some have called it a "clone".[1] There have been contradicting reports by the Chinese on its compatibility with APAS-89/95.[24] It has a circular transfer passage that has a diameter of 800 mm (31 in).[25][26] The androgynous variant has a mass of 310 kg and the non-androgynous variant has a mass of 200 kg.[27]
Used for the first time on Tiangong 1 space station and will be used on future Chinese space stations and with future Chinese cargo resupply vehicles. |
Androgynous (Shenzhou) Non-Androgynous (Tiangong-1) |
.png.webp) |
Chinese Docking Mechanism | Grappling-type | No | Used for China's uncrewed sample return missions when ascender transfers samples to orbiter for Earth return such as Chang'e 5/6. | Non-Androgynous |
 |
International Docking System Standard (IDSS) | Docking or Berthing | Yes | Used on the ISS International Docking Adapter, SpaceX Dragon 2, Boeing Starliner and future vehicles. Circular transfer passage diameter is 800 mm (31 in).[28] The International Berthing and Docking Mechanism (IBDM) is an implementation of IDSS to be used on European Space Agency spacecraft. [29] IDBM will also be used on Dream Chaser.[30] | Active, Passive, or Androgynous (i.e., both). Active(Commercial Crew Vehicle, Orion); Passive (IDA) |

|
ASA-G/ASP-G | Berthing | Yes | Used by Nauka Science (or Experiment) Airlock, to berth to nauka forward port. The berthing mechanism is a unique hybrid derivative the Russian APAS-89/APAS-95 system as it has 4 petals instead of 3 along with 12 structural hooks and is a combination of an active "probe and drogue" soft-dock mechanism on port and passive target on airlock. | Non-Androgynous |
| SSPA-GB 1/2 (Hybrid Docking System) | Docking | Yes | It is a modified passive hybrid version of SSVP-M8000.
Used on ISS (Prichal lateral ports for future add-on modules) |
Non-Androgynous |
Adapters
A docking or berthing adapter is a mechanical or electromechanical device that facilitates the connection of one type of docking or berthing interface to a different interface. While such interfaces may theoretically be docking/docking, docking/berthing, or berthing/berthing, only the first two types have been deployed in space to date. Previously launched and planned to be launched adapters are listed below:
- ASTP Docking Module: An airlock module that converted U.S. Probe and Drogue to APAS-75. Built by Rockwell International for the 1975 Apollo–Soyuz Test Project mission.[31]
- Pressurized Mating Adapter (PMA): Converts an active Common Berthing Mechanism to APAS-95. Three PMAs are attached to the ISS, PMA-1 and PMA-2 were launched in 1998 on STS-88, PMA-3 in late 2000 on STS-92. PMA-1 is used to connect the Zarya control module with Unity node 1, Space Shuttles used PMA-2 and PMA-3 for docking.
- International Docking Adapter (IDA):[32] Converts APAS-95 to the International Docking System Standard. IDA-1 was planned to be launched on SpaceX CRS-7 until its launch failure, and attached to Node-2's forward PMA.[32][33] IDA-2 was launched on SpaceX CRS-9 and attached to Node-2's forward PMA.[32][33] IDA-3, the replacement for IDA-1 launched on SpaceX CRS-18 and attached to Node-2's zenith PMA.[34] The adapter is compatible with the International Docking System Standard (IDSS), which is an attempt by the ISS Multilateral Coordination Board to create a docking standard.[35]
- APAS to SSVP: Converts passive Hybrid Docking System to passive SSVP-G4000.[36] The docking ring initially used for Soyuz MS-18 and Progress MS-17 docking on Nauka until detached by Progress MS-17 for Prichal module arrived on ISS.[37] This adapter is termed as SSPA-GM. It was made for the Nauka nadir and Prichal nadir ports of the International Space Station, where Soyuz and Progress spacecraft had to dock to a port designated for modules. Before removal of SSPA-GM, the docking ring is 80 cm (31 in) in diameter; that becomes 120 cm (47 in) after removal.
 ASTP Docking Module
ASTP Docking Module Pressurized Mating Adapter
Pressurized Mating Adapter International Docking Adapter
International Docking Adapter APAS to SSVP (SSVPA-GM) Docking Ring
APAS to SSVP (SSVPA-GM) Docking Ring
Docking of uncrewed spacecraft

For the first fifty years of spaceflight, the main objective of most docking and berthing missions was to transfer crew, construct or resupply a space station, or to test for such a mission (e.g. the docking between Kosmos 186 and Kosmos 188). Therefore, commonly at least one of the participating spacecraft was crewed, with a pressurized habitable volume (e.g. a space station or a lunar lander) being the target—the exceptions were a few fully uncrewed Soviet docking missions (e.g. the dockings of Kosmos 1443 and Progress 23 to an uncrewed Salyut 7 or Progress M1-5 to an uncrewed Mir). Another exception were a few missions of the crewed US Space Shuttles, like berthings of the Hubble Space Telescope (HST) during the five HST servicing missions. The Japanese ETS-VII mission (nicknamed Hikoboshi and Orihime) in 1997 was designed to test uncrewed rendezvous and docking, but launched as one spacecraft which separated to join back together.
Changes to the crewed aspect began in 2015, as a number of economically driven commercial dockings of uncrewed spacecraft were planned. In 2011, two commercial spacecraft providers announced plans to provide autonomous/teleoperated uncrewed resupply spacecraft for servicing other uncrewed spacecraft. Notably, both of these servicing spacecraft were intending to dock with satellites that weren't designed for docking, nor for in-space servicing.
The early business model for these services was primarily in near-geosynchronous orbit, although large delta-v orbital maneuvering services were also envisioned.[38]
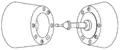
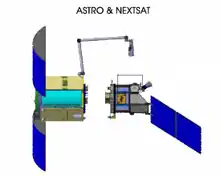
Building off of the 2007 Orbital Express mission—a U.S. government-sponsored mission to test in-space satellite servicing with two vehicles designed from the ground up for on-orbit refueling and subsystem replacement—two companies announced plans for commercial satellite servicing missions that would require docking of two uncrewed vehicles.
- Space Infrastructure Servicing (SIS) is a spacecraft that was being developed by Canadian aerospace firm MacDonald, Dettwiler and Associates (MDA)—maker of Canadarm—to operate as a small-scale in-space refueling depot for communication satellites in geosynchronous orbit. Intelsat was a requirements and funding partner for the initial demonstration satellite, intended for launch in 2015.[39][40]
- Mission Extension Vehicle (MEV)[41] was a spacecraft being developed in 2011 by the U.S. firm ViviSat, a 50/50 joint venture of aerospace firms U.S. Space and ATK, to operate as a small-scale in-space satellite-refueling spacecraft.[38] MEV would dock but would not transfer fuel. Rather it would use "its own thrusters to supply attitude control for the target."[38]
The SIS and MEV vehicles each planned to use a different docking technique. SIS planned to utilize a ring attachment around the kick motor[42] while the Mission Extension Vehicle would use a somewhat more standard insert-a-probe-into-the-nozzle-of-the-kick-motor approach.[38]
A prominent spacecraft that received a mechanism for uncrewed dockings is the Hubble Space Telescope (HST). In 2009 the STS-125 shuttle mission added the Soft-Capture Mechanism (SCM) at the aft bulkhead of the space telescope. The SCM is meant for unpressurized dockings and will be used at the end of Hubble's service lifetime to dock an uncrewed spacecraft to de-orbit Hubble. The SCM used was designed to be compatible to the NASA Docking System (NDS) interface to reserve the possibility of a servicing mission.[43] The SCM will, compared to the system used during the five HST Servicing Missions to capture and berth the HST to the Space Shuttle, significantly reduce the rendezvous and capture design complexities associated with such missions. The NDS bears some resemblance to the APAS-95 mechanism, but is not compatible with it.[44]
Non-cooperative docking
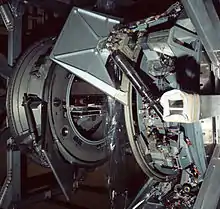
Docking with a spacecraft (or other man made space object) that does not have an operable attitude control system might sometimes be desirable, either in order to salvage it, or to initiate a controlled de-orbit. Some theoretical techniques for docking with non-cooperative spacecraft have been proposed so far.[45] Yet, with the sole exception of the Soyuz T-13 mission to salvage the crippled Salyut 7 space station, as of 2006, all spacecraft dockings in the first fifty years of spaceflight had been accomplished with vehicles where both spacecraft involved were under either piloted, autonomous or telerobotic attitude control.[45] In 2007, however, a demonstration mission was flown that included an initial test of a non-cooperative spacecraft captured by a controlled spacecraft with the use of a robotic arm.[46] Research and modeling work continues to support additional autonomous noncooperative capture missions in the coming years.[47][48]
Salyut 7 space station salvage mission

.jpg.webp)
Salyut 7, the tenth space station of any kind launched, and Soyuz T-13 were docked in what author David S. F. Portree describes as "one of the most impressive feats of in-space repairs in history".[14] Solar tracking failed and due to a telemetry fault the station did not report the failure to mission control while flying autonomously. Once the station ran out of electrical energy reserves it ceased communication abruptly in February 1985. Crew scheduling was interrupted to allow Soviet military commander Vladimir Dzhanibekov[49] and technical science flight engineer Viktor Savinykh[50] to make emergency repairs.
All Soviet and Russian space stations were equipped with automatic rendezvous and docking systems, from the first space station Salyut 1 using the IGLA system, to the Russian Orbital Segment of the International Space Station using the Kurs system. The soyuz crew found the station was not broadcasting radar or telemetry for rendezvous, and after arrival and external inspection of the tumbling station, the crew judged proximity using handheld laser rangefinders.
Dzhanibekov piloted his ship to intercept the forward port of Salyut 7, matched the station's rotation and achieved soft dock with the station. After achieving hard dock they confirmed that the station's electrical system was dead. Prior to opening the hatch, Dzhanibekov and Savinykh sampled the condition of the station's atmosphere and found it satisfactory. Attired in winter fur-lined clothing, they entered the cold station to conduct repairs. Within a week sufficient systems were brought back online to allow robot cargo ships to dock with the station. Nearly two months went by before atmospheric conditions on the space station were normalized.[14]
Uncrewed dockings of non-cooperative space objects
Non-cooperative rendezvous and capture techniques have been theorized, and one mission has successfully been performed with uncrewed spacecraft in orbit.[46]
A typical approach for solving this problem involves two phases. First, attitude and orbital changes are made to the "chaser" spacecraft until it has zero relative motion with the "target" spacecraft. Second, docking maneuvers commence that are similar to traditional cooperative spacecraft docking. A standardized docking interface on each spacecraft is assumed.[51]
NASA has identified automated and autonomous rendezvous and docking — the ability of two spacecraft to rendezvous and dock "operating independently from human controllers and without other back-up, [and which requires technology] advances in sensors, software, and realtime on-orbit positioning and flight control, among other challenges" — as a critical technology to the "ultimate success of capabilities such as in-orbit propellant storage and refueling," and also for complex operations in assembling mission components for interplanetary destinations.[52]
The Automated/Autonomous Rendezvous & Docking Vehicle (ARDV) is a proposed NASA Flagship Technology Demonstration (FTD) mission, for flight as early as 2014/2015. An important NASA objective on the proposed mission is to advance the technology and demonstrate automated rendezvous and docking. One mission element defined in the 2010 analysis was the development of a laser proximity operations sensor that could be used for non-cooperative vehicles at distances between 1 metre (3 ft 3 in) and 3 kilometers (2 mi). Non-cooperative docking mechanisms were identified as critical mission elements to the success of such autonomous missions.[52]
Grappling and connecting to non-cooperative space objects was identified as a top technical challenge in the 2010 NASA Robotics, tele-robotics and autonomous systems roadmap.[53]
Docking states
A docking/berthing connection is referred to as either "soft" or "hard". Typically, a spacecraft first initiates a soft dock by making contact and latching its docking connector with that of the target vehicle. Once the soft connection is secured, if both spacecraft are pressurized, they may proceed to a hard dock where the docking mechanisms form an airtight seal, enabling interior hatches to be safely opened so that crew and cargo can be transferred.
Berthing spacecraft and modules
Docking and undocking describe spacecraft using a docking port, without assistance and under their own power. Berthing takes place when a spacecraft or unpowered module cannot use a docking port or requires assistance to use one. This assistance may come from a spacecraft, such as when the Space Shuttle used its robotic arm to push ISS modules into their permanent berths. In a similar fashion the Poisk module was permanently berthed to a docking port after it was pushed into place by a modified Progress spacecraft which was then discarded. The Cygnus resupply spacecraft arriving at the ISS does not connect to a docking port, instead it is pulled into a berthing mechanism by the station's robotic arm and the station then closes the connection. The berthing mechanism is used only on the US segment of the ISS, the Russian segment of the ISS uses docking ports for permanent berths.
Mars surface docking
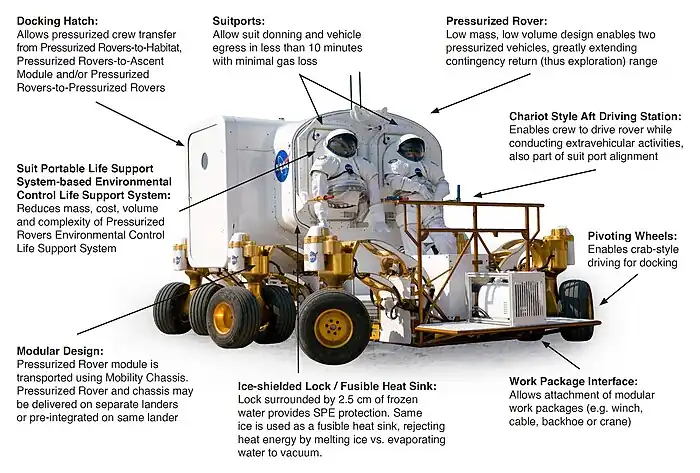
Docking has been discussed by NASA in regards to a Crewed Mars rover, such as with Mars habitat or ascent stage.[54] The Martian surface vehicle (and surface habitats) would have a large rectangular docking hatch, approximately 2 by 1 meter (6.6 by 3.3 ft).[54]
Gallery
 Timelapse of undocking of a Soyuz spacecraft from the International Space Station
Timelapse of undocking of a Soyuz spacecraft from the International Space Station
References
- 1 2 3 4 5 6 7 8 9 10 11 12 John Cook; Valery Aksamentov; Thomas Hoffman; Wes Bruner (January 1, 2011). "ISS Interface Mechanisms and their Heritage" (PDF). Houston, Texas: Boeing. Retrieved March 31, 2015.
Docking is when one incoming spacecraft rendezvous with another spacecraft and flies a controlled collision trajectory in such a manner so as to align and mesh the interface mechanisms. The spacecraft docking mechanisms typically enter what is called soft capture, followed by a load attenuation phase, and then the hard docked position which establishes an air-tight structural connection between spacecraft. Berthing, by contrast, is when an incoming spacecraft is grappled by a robotic arm and its interface mechanism is placed in close proximity of the stationary interface mechanism. Then typically there is a capture process, coarse alignment and fine alignment and then structural attachment.
- 1 2 3 "International Docking Standardization" (PDF). NASA. March 17, 2009. p. 15. Retrieved March 4, 2011.
Docking: The joining or coming together of two separate free flying space vehicles
- 1 2 3 4 5 Fehse, Wigbert (2003). Automated Rendezvous and Docking of Spacecraft. Cambridge, UK: Cambridge University Press. ISBN 978-0521824927.
- 1 2 3 4 5 6 "Advanced Docking/Berthing System – NASA Seal Workshop" (PDF). NASA. November 4, 2004. p. 15. Archived from the original (PDF) on September 22, 2011. Retrieved March 4, 2011.
Berthing refers to mating operations where an inactive module/vehicle is placed into the mating interface using a Remote Manipulator System-RMS. Docking refers to mating operations where an active vehicle flies into the mating interface under its own power.
- ↑ Pete Harding (February 25, 2015). "EVA-30 concludes latest ISS commercial crew preparations". NASASpaceFlight.com. Retrieved April 9, 2023.
- 1 2 "Mir Hardware Heritage Part 1: Soyuz" (PDF). NASA. p. 10. Archived from the original (PDF) on December 26, 2017. Retrieved October 3, 2018.
- ↑ "History". Archived from the original on April 24, 2008. Retrieved June 23, 2010.
- ↑ "Model of a Soyuz-4-5 spacecraft". MAAS Collection. Retrieved October 22, 2021.
- ↑ "NSSDCA – Spacecraft – Details". NASA (in Norwegian). Retrieved October 22, 2021.
- ↑ "NSTS 21492 Space Shuttle Program Payload Bay Payload User's Guide (Basic)".(Lyndon B. Johnson Space Center, Houston Texas, 2000)
- ↑ History of U.S. Docking Systems (10/05/2010) Archived May 24, 2011, at the Wayback Machine
- ↑ "Apollo 9 Press Kit" (PDF). NASA. February 23, 1969. p. 43. Retrieved March 17, 2015.
The tunnel is 32 inches (.81 cm) in diameter and is used for crew transfer between the CSM and LM by crewmen in either pressurized or unpressurized extravehicular mobility units (EMU).
- ↑ Harland, David (2011). Apollo 12 – On the Ocean of Storms: On the Ocean of Storms. New York: Springer. p. 138.
- 1 2 3 4 5 Portree, David (March 1995). "Mir Hardware Heritage" (PDF). NASA. Archived from the original (PDF) on September 7, 2009. Retrieved December 11, 2011.
- 1 2 M.Cislaghi; C.Santini (October 2008). "The Russian Docking System and the Automated Transfer Vehicle: a safe integrated concept" (PDF). ESA. Archived from the original (PDF) on February 3, 2013. Retrieved May 14, 2016.
- 1 2 3 4 5 6 7 "Docking Systems". RussianSpaceWeb.com. Retrieved September 2, 2012.
- 1 2 3 4 5 Bart Hendrickx; Bert Vis (2007). Energiya-Buran: The Soviet Space Shuttle. Chichester, UK: Praxis Publishing Ltd. pp. 379–381. ISBN 978-0-387-69848-9.
For space station missions Buran would have carried a Docking Module (SM) in the forward part of the payload bay. It consisted of a spherical section (2.55 m in diameter) topped with a cylindrical tunnel (2.2 m in diameter) with an APAS-89 androgynous docking port, a modified version of the APAS-75 system developed by NPO Energiya for the 1975 Apollo-Soyuz Test Project (Page 141). The plan was for the orbiter to be launched uncrewed and fly to the Mir space station, where it would dock with the axial APAS-89 docking port of the Kristall module (Page 246). In the late 1980s NPO Energiya was ordered to build three Soyuz spacecraft (serial numbers 101, 102, 103) with APAS-89 docking ports (Page 246). Soyuz craft nr. 101 was eventually launched as Soyuz TM-16 on January 1993, carrying another resident crew (Gennadiy Manakov and Aleksandr Poleshchuk) to Mir space station. Equipped with an APAS-89 docking port, it was the only Soyuz vehicle to ever docking with the Kristall module. Soyuz "rescue" vehicle nr. 102 and 103, which had only been partially assembled, were modified as ordinary Soyuz TM spacecraft with standard probe docking mechanisms and were given new serial numbers (Page 249). In July 1992 NASA initiated the development of the Orbiter Docking System (ODS) to support Shuttle flights to Mir. Mounted in the forward end of the payload bay, the ODS consists of an external airlock, a supporting truss structure, and an APAS docking port. While the first two elements were built by Rockwell, the APAS was manufactured by RKK Energiya. Although Energiya's internal designator for the Shuttle APAS is APAS-95, it is essentially the same as Buran's APAS-89. While the ODS was slightly modified for Shuttle missions to ISS, APAS remained unchanged (Page 380).
- ↑ "Kristall module (77KST)". www.russianspaceweb.com.
- ↑ "Space Shuttle Mission STS-74 Press Kit" (PDF). NASA. Retrieved December 28, 2011.
Atlantis will carry the Russian-built Docking Module, which has multi-mission androgynous docking mechanisms at top and bottom
- ↑ NASA.gov
- ↑ Harding, Pete (July 29, 2021). "MLM Nauka docks to ISS, malfunctions shortly thereafter". NASASpaceFlight. Retrieved July 30, 2021.
- ↑ Stephen Clark (February 25, 2015). "Tests of new Dragon systems to begin minutes after launch". Spaceflight Now. Retrieved April 9, 2023.
- ↑ "Cygnus Pressurized Cargo Module Completes Proof-Pressure Testing". Orbital Sciences. August 2010. Archived from the original on April 17, 2013. Retrieved March 16, 2015.
The PCM hatch has a strong resemblance to the current hatches used on the US-segment of the ISS. However, at 37 inches on each side, it is somewhat smaller than the 50 inch ISS hatch.
- ↑ "China's First Space Station Module Readies for Liftoff". Space News. August 1, 2012. Archived from the original on September 17, 2012. Retrieved September 3, 2012.
- ↑ "Differences between Shenzhou-8 and Shenzhou-7". CCTV. October 31, 2011. Archived from the original on March 28, 2016. Retrieved March 17, 2015.
there will be an 800-millimetre cylindrical passage connecting Shenzhou-8 and Tiangong-1.
- ↑ Clark, Stephen (June 18, 2012). "Chinese astronauts open door on orbiting research lab". Spaceflight Now. Retrieved March 17, 2015.
Jing floated through the narrow 31-inch passage leading into Tiangong 1
- ↑ Qiu Huayon; Liu Zhi; Shi Junwei; Zheng Yunqing (August 2015). "Birth of the Chinese Docking System". Go Taikonauts!. No. 16. p. 12.
- ↑ International Docking System Standard (PDF) (Rev. C ed.). November 20, 2013. Archived from the original (PDF) on December 16, 2013.
- ↑ "Status of Human Exploration and Operations Mission Directorate (HEO)" (PDF). NASA. July 29, 2013. Retrieved March 19, 2014.
- ↑ "QinetiQ Space Wins ESA Contract for International Berthing Docking Mechanism". Space Ref Business. Archived from the original on September 6, 2020. Retrieved January 9, 2015.
- ↑ "Apollo ASTP Docking Module". Astronautix. Archived from the original on December 27, 2016. Retrieved April 7, 2018.
- 1 2 3 Hartman, Dan (July 23, 2012). "International Space Station Program Status" (PDF). NASA. Retrieved August 10, 2012.
- 1 2 Hartman, Daniel (July 2014). "Status of the ISS USOS" (PDF). NASA Advisory Council HEOMD Committee. Retrieved October 26, 2014.
- ↑ Pietrobon, Steven (August 20, 2018). "United States Commercial ELV Launch Manifest". Retrieved August 21, 2018.
- ↑ Bayt, Rob (July 26, 2011). "Commercial Crew Program: Key Drving Requirements Walkthrough". NASA. Archived from the original on March 28, 2012. Retrieved July 27, 2011.
- ↑ "Новости. "Прогресс МС-17" освободил место для нового модуля". www.roscosmos.ru. Retrieved November 27, 2021.
- ↑ "Новости. Новый модуль вошел в состав российского сегмента МКС". www.roscosmos.ru. Retrieved November 27, 2021.
- 1 2 3 4
Morring, Frank Jr. (March 22, 2011). "An End to Space Trash?". Aviation Week. Retrieved March 21, 2011.
ViviSat, a new 50-50 joint venture of U.S. Space and ATK, is marketing a satellite-refueling spacecraft that connects to a target spacecraft using the same probe-in-the-kick-motor approach as MDA, but does not transfer its fuel. Instead, the vehicle becomes a new fuel tank, using its own thrusters to supply attitude control for the target. ... [the ViviSat] concept is not as far along as MDA. ... In addition to extending the life of an out-of-fuel satellite, the company could also rescue fueled spacecraft like AEHF-1 by docking with it in its low orbit, using its own motor and fuel to place it in the right orbit, and then moving to another target.
- ↑ "Intelsat Picks MacDonald, Dettwiler and Associates Ltd. for Satellite Servicing". press release. CNW Group. Archived from the original on May 12, 2011. Retrieved March 15, 2011.
MDA planned to launch its Space Infrastructure Servicing ("SIS") vehicle into near geosynchronous orbit, where it would service commercial and government satellites in need of additional fuel, re-positioning or other maintenance. The first refueling mission was to be available 3.5 years following the commencement of the build phase. ... The services provided by MDA to Intelsat under this agreement are valued at more than US$280 million.
- ↑
de Selding, Peter B. (March 14, 2011). "Intelsat Signs Up for Satellite Refueling Service". Space News. Archived from the original on May 24, 2012. Retrieved March 15, 2011.
if the MDA spacecraft performed as planned, Intelsat would pay a total of some $200 million to MDA. This assumed that four or five satellites would be given around 200 kilograms each of fuel.
- ↑ "ViviSat Corporate Overview". company website. ViviSat. Archived from the original on January 24, 2018. Retrieved March 28, 2011.
- ↑
de Selding, Peter B. (March 18, 2011). "Intelsat Signs Up for MDA's Satellite Refueling Service". Space News. Archived from the original on March 21, 2012. Retrieved March 20, 2011.
more than 40 different types of fueling systems ... SIS will be carrying enough tools to open 75 percent of the fueling systems aboard satellites now in geostationary orbit. ... MDA will launch the SIS servicer, which will rendezvous and dock with the Intelsat satellite, attaching itself to the ring around the satellite's apogee-boost motor. With ground teams governing the movements, the SIS robotic arm will reach through the nozzle of the apogee motor to find and unscrew the satellite's fuel cap. The SIS vehicle will reclose the fuel cap after delivering the agreed amount of propellant and then head to its next mission. ... Key to the business model is MDA's ability to launch replacement fuel canisters that would be grappled by SIS and used to refuel dozens of satellites over a period of years. These canisters would be much lighter than the SIS vehicle and thus much less expensive to launch.
- ↑ NASA (2008). "The Soft Capture and Rendezvous System". NASA. Retrieved May 22, 2009.
- ↑ Parma, George (May 20, 2011). "Overview of the NASA Docking System and the International Docking System Standard" (PDF). NASA. Archived from the original (PDF) on October 15, 2011. Retrieved April 11, 2012.
- 1 2 Ma, Zhanhua; Ma, Ou & Shashikanth, Banavara (October 2006). "Optimal Control for Spacecraft to Rendezvous with a Tumbling Satellite in a Close Range" (PDF). 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 4109–4114. doi:10.1109/IROS.2006.281877. ISBN 1-4244-0258-1. S2CID 12165186. Archived from the original (PDF) on June 5, 2013. Retrieved August 9, 2011.
One of the most challenging tasks for satellite on-orbit servicing is to rendezvous and capture a non-cooperative satellite such as a tumbling satellite.
- 1 2 Clark, Stephen (July 4, 2007). "In-space satellite servicing tests come to an end". Spaceflight Now. Retrieved March 20, 2014.
- ↑ Xu, Wenfu (September 2010). "Autonomous rendezvous and robotic capturing of non-cooperative target in space". Robotica. 28 (5): 705–718. doi:10.1017/S0263574709990397. S2CID 43527059. Retrieved November 16, 2014.
- ↑ Yoshida, Kazuya (2004). "Dynamics, control and impedance matching for robotic capture of a non-cooperative satellite". Advanced Robotics. 18 (2): 175–198. doi:10.1163/156855304322758015. S2CID 33288798.
- ↑ "Dzhanibekov". Astronautix.com. Archived from the original on December 11, 2016. Retrieved August 5, 2013.
- ↑ "Savinykh". Astronautix.com. Archived from the original on December 11, 2016. Retrieved August 5, 2013.
- ↑
"Optimal Control of Rendezvous and Docking with a Non-Cooperative Satellite" (PDF). New Mexico State University. Archived from the original (PDF) on June 5, 2013. Retrieved July 9, 2011.
Most of the current research and all the past missions are aiming at capturing very cooperative satellites only. In the future, we may also need to capture non-cooperative satellites such as the ones tumbling in space or not designed for being captured.
- 1 2 Tooley, Craig (May 25, 2010). "A New Space Enterprise of Exploration" (PDF). NASA. Retrieved June 25, 2012.
- ↑ Ambrose, Rob (November 2010). "Robotics, Tele-Robotics and Autonomous systems Roadmap (Draft)" (PDF). NASA. Retrieved June 25, 2012.
A smaller common docking system for robotic spacecraft is also needed to enable robotic spacecraft AR&D within the capture envelopes of these systems. Assembly of the large vehicles and stages used for beyond LEO exploration missions will require new mechanisms with new capture envelopes beyond any docking system currently used or in development. Development and testing of autonomous robotic capture of non-cooperative target vehicles in which the target does not have capture aids such as grapple fixtures or docking mechanisms is needed to support satellite servicing/rescue.
- 1 2 Space Exploration Vehicle Concept 2010
| Adapters | | |
|---|---|---|---|
| Mechanisms |
| ||
| Navigation systems | |||
Category:Spacecraft docking systems | |||