Układ zamknięty (ang. closed-loop system) – układ sterowania, w którym przebieg sygnału następuje w dwóch kierunkach. Od wejścia do wyjścia przebiega sygnał realizujący wzajemne oddziaływanie elementów, natomiast od wyjścia do wejścia przebiega sygnał sprzężenia zwrotnego.
Wstęp
Sterowanie w układzie zamkniętym (ręczne lub automatyczne) różni się od sterowania w układzie otwartym tym, że człowiek lub regulator otrzymują dodatkowo poprzez sprzężenie zwrotne informacje o stanie wielkości wyjściowej (lub o stanie obiektu). Informacja ta (odczytana z miernika lub podana w postaci np. napięcia do regulatora) jest używana do korygowania nastaw wielkości wejściowej.
Ponieważ sprzężenie zwrotne może być dwojakiego typu: sprzężenie zwrotne ujemne i sprzężenie zwrotne dodatnie wyróżnia się też dwa typy układów zamkniętych:
- układ zamknięty z ujemnym sprzężeniem zwrotnym
- układ zamknięty z dodatnim sprzężeniem zwrotnym.
Ponadto można wyróżnić układy zamkniętym ze:
- sprzężeniem zwrotnym od wyjścia obiektu sterowania (podejście częściej spotykane w klasycznej teorii sterowania, która operuje modelami wejścia-wyjścia) lub
- sprzężeniem zwrotnym od stanu obiektu sterowania (podejście wygodniejsze w nowoczesnej teorii sterowania, która operuje modelami stanów układu).
Układ zamknięty z ujemnym sprzężeniem zwrotnym
Układ zamknięty z ujemnym sprzężeniem zwrotnym zwany też układem regulacji, jest pewnym dalej idącym usprawnieniem w porównaniu do sterowania w układzie otwartym lub sterowania w układzie ze sprzężeniem w przód. W praktyce na układ sterowania (sterowany obiekt i sterownik) oddziałują zakłócenia zewnętrzne ponadto sam obiekt sterowany wykazuje pewną zmienność (przez co ewentualny jego opis albo model nie jest zwykle dokładny). Dlatego też aby poprawić skuteczność sterowania w takich warunkach wprowadza się do układu sprzężenie. Pewną poprawę sterowania (czasami wystarczającą) daje już sprzężenie w przód, ale znacznie lepsze efekty przynosi zastosowanie sprzężenia zwrotnego (najczęściej jest to sprzężenie zwrotne ujemne).
Zamknięta ujemna pętla sprzężenia zwrotnego, ma właściwości stabilizujące i linearyzujące. Układ zamknięty, w porównaniu do układu otwartego, jest mniej czuły na zmiany wzmocnienia statycznego w układzie, powodując zmniejszenie uchybów statycznych (jeśli występują), jednak zbyt duża wartość współczynnika wzmocnienia, może spowodować niestabilność układów wyższych rzędów. Poprawia parametry jakościowe odpowiedzi skokowej układu automatyki oraz lepiej sprawdza się w przypadku tłumienia nieznanych zakłóceń, których pojawienie się powoduje zmianę błędu regulacji, co skutkuje powstaniem odpowiedniego sygnału sterującego.
Wadą takiego rozwiązania jest konieczność pojawienia się zakłóceń na wyjściu sterowanego obiektu by zostały zauważone, następnie skompensowane przez regulator. Dlatego w przypadku mierzalnych sygnałów zakłóceń lepsze efekty daje, wraz z zamkniętą pętlą od wartości sterowanej, sterowanie w otwartej pętli od zakłóceń (sprzężenie w przód).
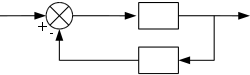
Analiza układu zamkniętego z ujemnym sprzężeniem zwrotnym od wyjścia

Wyjście układu jest porównywane z wartością zadaną a różnica tych wielkości, zwana uchybem jest podana na wejście regulatora Dzięki temu regulator posiada informację o aktualnym błędzie sterowania i może tak zmieniać wartość wejściową obiektu aby zmniejszyć uchyb do zera. Co za tym idzie, wielkość wyjściowa układu jest stale utrzymywana możliwie blisko wartości zadanej.






Jeśli założymy, że regulator i obiekt są liniowe, stacjonarne i jednowejściowe oraz jednowyjściowe, możemy dokonać analizy układu przy użyciu transformaty Laplace’a. Uzyskamy wtedy następujące zależności:





Rozwiązując układ równań, wyznaczamy zależność od co daje:



Wyrażenie to funkcja przejścia naszego układu.

Jeśli zapewnimy prawdziwość wyrażenia to z funkcji przejścia mamy:


Oznacza to, że kontrolujemy wartość wyjściową układu, zmieniając po prostu wartość zadaną.
Uwzględnienie transmitancji toru sprzężenia zwrotnego
![{\displaystyle C(s)=G(s)\cdot [R(s)-H(s)\cdot C(s)],}](../I/06764515c2b0c5e710a2f198244836c05ea0659b.svg)


gdzie:
- – transformata Laplace’a sygnału wejściowego,
- – transformata Laplace’a sygnału wyjściowego,
- – transmitancja toru głównego,
- – transmitancja toru sprzężenia zwrotnego.




Układ zamknięty z dodatnim sprzężeniem zwrotnym
Układ zamknięty z dodatnim sprzężeniem zwrotnym – w układzie zamkniętym z dodatnim sprzężeniem zwrotnym sygnał wyjściowy jest dodawany do sygnału wejściowego, co skutkuje nieskończenie rosnącym sygnałem wyjściowym układu. Dodatnia pętla sprzężenia zwrotnego może być stosowana jako jedna z wielu pętli skomplikowanych układów regulacji.