






Przestrzeń styczna – to przestrzeń liniowa utworzona z wektorów zaczepionych w ustalonym punkcie przestrzeni przy czym:

- Przestrzeń w ogólności może być dowolną rozmaitością topologiczną.
- Wymiar przestrzeni stycznej jest równy wymiarowi rozmaitości
- Każdy element przestrzeni stycznej – wektor styczny do w punkcie – jest styczny do jakiejś krzywej gładkiej rozmaitości, przechodzącej przez punkt
- Przestrzeń styczną do w punkcie oznacza się lub




Przestrzenie styczne do rozmaitości w różnych jej punktach są różnymi przestrzeniami.
Wektory z przestrzeni stycznej tworzą zbiór możliwych wektorów prędkości jakie może mieć ciało w położeniu poruszając się po rozmaitości. Po przesunięciu się ciała do innego punktu prędkość ciała będzie dana przez inny wektor – taki, który należy do przestrzeni stycznej tego punktu (nie jest to widoczne na rysunku).


Przestrzeń styczna do 2-wymiarowej powierzchni
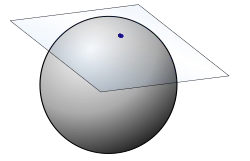
Wszystkie krzywe przechodzące przez dany punkt leżący na 2-wymiarowej powierzchni (np. powierzchni sfery czy elipsoidy itp.) mają wektor styczny, zaczepiony w tym punkcie. Suma dwóch wektorów stycznych jest nadal wektorem stycznym do jakiejś krzywej na tej powierzchni, przechodzącej przez punkt To samo dotyczy mnożenia wektorów stycznych przez skalar.
Wszystkie wektory styczne do krzywych na powierzchni rozpinają więc w punkcie 2-wymiarową przestrzeń styczną – płaszczyznę styczną w punkcie do powierzchni
Płaszczyzna styczna w punkcie stanowi więc przybliżenie płaskie (liniowe w 2 wymiarach) powierzchni zakrzywionej przybliżenie to jest tym lepsze, im bliżej punktu znajdują się punkty rozmaitości.

Przestrzeń styczna do 3-wymiarowej przestrzeni euklidesowej
W 3-wymiarowej przestrzeni euklidesowej wektor zaczepiony w pewnym punkcie jest określony przez punkt zaczepienia oraz 3 współrzędne. Wektory zaczepione w różnych punktach uważa się za odrębne, nawet jeśli mają te same współrzędne. Wektory zaczepione w tym samym punkcie tworzą 3-wymiarową przestrzeń euklidesową, gdyż spośród wszystkich takich wektorów można wybrać tylko 3 liniowo niezależne. Wektory te tworzą bazę przestrzeni stycznej do w punkcie i oznacza symbolem


Wektory należą do tej samej przestrzeni stycznej, jeżeli mają ten sam punkt zaczepienia. Wektory zaczepione w różnych punktach przestrzeni należą do różnych przestrzeni stycznych.
Przestrzeń styczna do 3-wymiarowej rozmaitości
Krzywe w 3-wymiarowej, dowolnej rozmaitości przechodzące przez ustalony punkt mają wektory do nich styczne w tym punkcie. Wektory te rozpinają 3-wymiarową przestrzeń euklidesową, styczną do przestrzeni w punkcie która jest aproksymacją płaską rozmaitości w ogólnym przypadku dowolnie zakrzywionej.
Przestrzeń styczna – pojęcie wewnętrzne rozmaitości
W opisie przestrzeni stycznej do dowolnej rozmaitości nie jest konieczne odwoływanie się do przestrzeni euklidesowej wyższego wymiaru, w której ta rozmaitość jest zanurzona.
Przykładowo sfera jest rozmaitością różniczkową 2-wymiarową. Powierzchnię sfery w otoczeniu punktu można sparametryzować za pomocą współrzędnych sferycznych i Mówi się, że za pomocą tych współrzędnych określona jest mapa ze sfery na przestrzeń przy czym:



- każdemu punktowi na sferze odpowiada jednoznacznie punkt o współrzędnych w przestrzeni
- każdej krzywej na sferze odpowiada jednoznacznie krzywa w złożona z punktów o współrzędnych odpowiadających punktom krzywej;
- wektorowi stycznemu do krzywej na sferze odpowiada wektor styczny do krzywej w przestrzeni






Tak określona przestrzeń styczna jest przestrzenią wektorową wymiaru 2, czyli tego samego wymiaru co sfera, do której jest styczna, gdyż:
- działaniom dodawania wektorów na sferze i mnożenia ich przez skalar (czyli działania określone w każdej przestrzeni wektorowej) odpowiadają analogiczne działania na odpowiadających im wektorach w przestrzeni
- przestrzeń styczna nie zależy od wyboru współrzędnych krzywoliniowych i będzie identyczna dla każdej innej mapy.
Zatem wektory styczne do sfery w punkcie tworzą 2-wymiarową przestrzeń styczną – płaszczyznę Pokazaliśmy to nie odwołując się do pojęcia zanurzenia sfery w przestrzeni 3-wymiarowej.
Przestrzeń styczna do n-wymiarowej rozmaitości
Rozmaitość w najogólniejszym przypadku jest przestrzenią topologiczna, która ma lokalnie własności przestrzeni euklidesowej. Rozmaitość ma wymiar jeżeli przez każdy punkt rozmaitości przechodzą krzywe, których wektory styczne tworzą n-wymiarowe przestrzenie styczne (przestrzenie euklidesowe).

Definicja formalna przestrzeni stycznej
(1) Niech będzie mapą otoczenia punktu rozmaitości różniczkowej klasy wymiaru




Krzywą klasy na rozmaitości przechodzącą przez punkt nazywa się odwzorowanie klasy dowolnego przedziału w tj.



takie że

(2) Na zbiorze wszystkich krzywych klasy na rozmaitości i przechodzących przez punkt określamy relację równoważności taką, że dwie krzywe i są w relacji o ile wektory styczne w zerze do krzywych oraz (obie krzywe leżą w ) są równe, czyli:








Można sprawdzić, że taka definicja relacji nie zależy od wyboru początkowej mapy

(3) Przestrzeń styczną do rozmaitości różniczkowej klasy w punkcie oznaczaną definiuje się jako zbiór klas abstrakcji relacji



Odwzorowanie przyporządkowujące krzywej przechodzącej przez jej wektor styczny w zerze:



jest stałe na klasach abstrakcji relacji i indukuje bijekcję daną wzorem: gdzie oznacza klasę abstrakcji krzywej względem relacji Zatem ma strukturę przestrzeni liniowej wymiaru przeniesioną przez bijekcję tzn. działania w przestrzeni stycznej definiujemy następująco[2]:





- dla dowolnych


- dla dowolnego oraz dowolnego



(4) Niezależność od wyboru mapy
Definicja przestrzeni stycznej nie zależy od wyboru mapy początkowej Wzięcie innej mapy nie zmienia równości wektorów stycznych do krzywych, czyli relacji
