Real-time magnetic resonance imaging (RT-MRI) refers to the continuous monitoring ("filming") of moving objects in real time. Because MRI is based on time-consuming scanning of k-space, real-time MRI was possible only with low image quality or low temporal resolution. Using an iterative reconstruction algorithm these limitations have recently been removed: a new method for real-time MRI achieves a temporal resolution of 20 to 30 milliseconds for images with an in-plane resolution of 1.5 to 2.0 mm.[2] Real-time MRI promises to add important information about diseases of the joints and the heart. In many cases MRI examinations may become easier and more comfortable for patients.
History
1977/1978 - Raymond Damadian built the first MRI scanner and achieved the first MRI scan of a healthy human body (1977) with the intent of diagnosing cancer.[3] Additionally, Peter Mansfield develops the echo-planar technique, producing images in seconds and becoming the basis for fast MRIs.[4]
1983 - Introduction of the k-space by D B Twieg[5]
1987 - First real-time MRI of the heart is developed[6]
1997 - Parallel imaging with an RF coil array is introduced by D K Sodickson[7]
1999 - SENSE image reconstruction is introduced by K P Pruessmann[8]
2002 - GRAPPA image reconstruction is introduced by Mark Griswold[9]
Physical basis
Overview
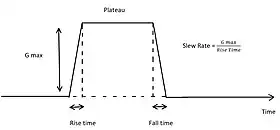
In general, real time MRI relies on gradient echo sequences, efficient k-space sampling, and fast reconstruction methods to speed up the image acquisition process.[10] Gradient echo sequences present shorter echo times since only one RF pulse is required for each sequence.[11] Modern fast-switching gradient coils also require increasing the slew rate, allowing for faster changes in gradient echo sequences and decreasing the repetition time.[12]
k-space sampling
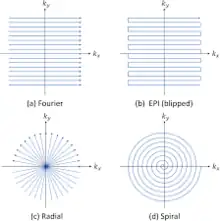
Efficient k-space sampling also decreases data collection time. Rectilinear scanning has become the standard k-space sampling method for MRI.[13] However, the process takes a relatively long time as it samples the entire k-space equally. Because of this delay, other sampling methods are used to capture real-time motion. Single shot echo planar imaging is one extremely fast sampling method in which all of the data for the MR image is collected from one RF pulse.[14] However, it is important to note that the EPI method is still a Cartesian sampling method, like the rectilinear scan, equally sampling the entire k-space. Spiral sampling, like EPI, only requires a single RF pulse to sample the entire k-space. Radial and spiral sampling are also used as methods to efficiently sample the k-space, with spiral also only requiring a single RF pulse to sample the k-space. Both radial and spiral sampling are more efficient than the Cartesian methods because they oversample low frequencies, which allows for general motion capture and better real-time image reconstruction.[10] Thus, radial or spiral sampling of the k-space are now the preferred methods for real-time MRI reconstruction.
Parallel imaging
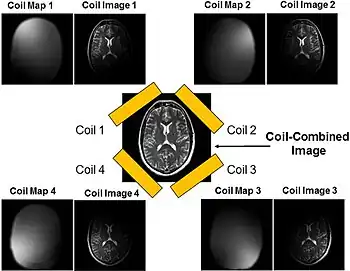
Parallel imaging involves the addition of multiple coils surrounding the target with each coil acquiring a fraction of the total image. Because modern GPUs have parallel processing capabilities, they can reconstruct each portion of the image simultaneously. Therefore, the more coils used, the faster the acquisition of the MR images.[15]
Gradient-echo sequences
FLASH MRI
While early applications were based on echo planar imaging, which found an important application in real-time functional MRI (rt-fMRI),[16] recent progress is based on iterative reconstruction and FLASH MRI.[17][18] The real-time imaging method proposed by Uecker and colleagues[2] combines radial FLASH MRI,[19] which offers rapid and continuous data acquisition, motion robustness, and tolerance to undersampling, with an iterative image reconstruction method based on the formulation of image reconstruction as a nonlinear inverse problem.[20][21] By integrating the data from multiple receive coils (i.e. parallel MRI) and exploiting the redundancy in the time series of images with the use of regularization and filtering, this approach enhances the possible degree of data undersampling by one order of magnitude, so that high-quality images may be obtained out of as little as 5 to 10% of the data required for a normal image reconstruction.
Because of the very short echo times (e.g., 1 to 2 milliseconds), the method does not suffer from off-resonance effects, so that the images neither exhibit susceptibility artifacts nor rely on fat suppression. While spoiled FLASH sequences offer spin density or T1 contrast, versions with refocused or fully balanced gradients provide access to T2/T1 contrast. The choice of the gradient-echo time (e.g., in-phase vs opposed-phase conditions) further alters the representation of water and fat signals in the images and will allow for separate water/fat movies.
Balanced steady state free precession
Another GRE sequence commonly used in RT-MRI is balanced steady state free precession (bSSFP), as mentioned above with balanced gradients.[10] Steady state free precession involves a repetition time (TR) that is shorter than T2. This prevents the magnetic signal from decaying completely before the next RF pulse is applied, which then establishes a steady state signal over time.[22] The short TR also makes bSSFP ideal for RT-MRI.
The equation for peak MR signal in bSSFP is given as:

Where is the initial magnetization, and .



Thus, the MR signal is proportional to T2/T1. Materials with similar T1 and T2, such as fluids and fat, present high T2/T1 contrast and can have signal intensity up to .

The bSSFP signal is also greater than the FLASH signal by a factor of
.[22]

Due to this strong fluid/tissue contrast, RT-MRI with bSSFP lends itself to cardiac imaging and visualizing blood flow.[22]
Image reconstruction
SENSitivity Encoding (SENSE)
Certain image reconstruction algorithms used alongside parallel imaging address the potential issues that can arise from undersampling the k-space. SENSitivity Encoding (SENSE) is a method that reconstructs the partial k-space data from each coil and combines the partial images into the final scan in the spatial domain.[23] Coil sensitivities must first be acquired either before the actual imaging or during the imaging process. During the rest of imaging, the k-space is undersampled to skip every other line, resulting in a ½ FOV.
As a two-point example, pixels on the original aliased images can be “unfolded” through the following equations to give the final scan:


for two points, and , in the final image. and denote the image signal for the aliased image. and are the sensitivity values for coil 1 at points and , respectively, and and are the sensitivity values for coil 2 at points and , respectively.[23]








GeneRalized Autocalibrating Partial Parallel Acquisition (GRAPPA)
Another reconstruction algorithm used is GeneRalized Autocalibrating Partial Parallel Acquisition (GRAPPA). GRAPPA fills in the undersampled k-space data in the k-space domain before reconstructing the final image.[24] Lines through the center of the k-space are fully sampled, typically alongside the actual image, to give the autocalibration signal (ACS) region. Weighing factors are calculated using the ACS, and these factors reflect the coil-specific distortions that each coil applies on the full field-of-view frequency domain. Then, the filled-in k-space data undergoes the inverse Fourier transform to construct the partial, non-aliased images. These images are then simply combined directly in the spatial domain.[24]
If the k-space data is non-Cartesian, reconstruction is computationally more difficult, since the fast Fourier transform (FFT) requires Cartesian values. Typically, k-space data must be resampled into Cartesian coordinates before applying the FFT. GRAPPA can address these issues by obtaining large quantities of calibration data; however, the fastest reconstructions will generally require Cartesian data.[10]
Signal-to-noise ratio
Lastly, within parallel image reconstruction there is another factor to consider, which is the signal to noise ratio (SNR). The SNR for parallel imaging can be calculated using the following equation:

Where is the acceleration factor and is the spatially dependent geometry factor (proportional to the number of coils used or the interactions between coils). Therefore, the more coils used, the faster the imaging process and the more inter-coil interactions; hence, the lower the SNR.[25]


Applications

Cardiac MRI
Although applications of real-time MRI cover a broad spectrum ranging from non-medical studies of turbulent flow[26] to the noninvasive monitoring of interventional (surgical) procedures, the most important application making use of the new capabilities is cardiovascular imaging.[1] Previous cardiac MR (CMR) used cine techniques to capture the periodic motion of the heart. However, this is not feasible for patients with arrhythmia, where the cardiac cycle is unpredictable.[27] With the new method it is possible to obtain movies of the beating heart in real time with up to 50 frames per second during free breathing and without the need for a synchronization to the electrocardiogram.[28] A study performed by Laubrock et al.[27] demonstrated that RT-MRI produced higher quality images with a higher SNR than cine CMR with a bSSFP sequence and radial k-space sampling. RT-MRI also removes the need for breath-holding while imaging, leading to a more comfortable experience for the patient as well.[27]
Musculoskeletal MRI
Apart from cardiac MRI other real-time applications deal with functional studies of joint kinetics (e.g., temporomandibular joint,[29] knee and the wrist[30]) or address the coordinated dynamics of the articulators such as lips, tongue, soft palate and vocal folds during speaking (articulatory phonetics)[31] or swallowing.[32] Musculoskeletal imaging in particular benefits from real-time observation. Researchers at the NYU Grossman School of Medicine[33] developed a RT-MRI glove for imaging movement of the hand. The glove uses high impedance coils to prevent the generation of eddy currents from rapidly changing magnetic fields and bSSFP for rapid imaging times. High-impedance coils remove the need for specific coil conformations and active gradient shielding.[34]
MRI-guided invasive procedures
Applications in interventional MRI, which refers to the monitoring of minimally invasive surgical procedures, are possible by interactively changing parameters such as image position and orientation. This application is particularly helpful when a 3D image of the tissue is needed during surgery.[10] It requires an in-room display for the physician to use during the procedure as well as the use of MRI-safe surgical tools. These include ceramic, plastic, or titanium, which is a paramagnetic metal. By using bSSFP and parallel imaging with multiple coils, frame rates of 5-10 frames per second have been accomplished, allowing for the visualization of cardiac procedures.[10]
Future directions
Parallel imaging
Parallel imaging coils are available for torso and cardiac imaging, but they are not yet standardized for other body parts. Dynamic coil setups for speech and musculoskeletal imaging are key areas for current research.[10]

Machine learning
Image reconstruction in RT-MRI benefits from machine learning (ML) or deep learning (DL). A nonlinear kernel, or mapping function, can be developed from the ACS to fill in k-space data and generate the final image.[35] This process as a whole significantly accelerates the MRI process. Image segmentation or identification of lesions can be achieved through machine learning. In deep learning, with a convolutional neural network, the mapping function can be specified by the network. ML and DL improve image resolution as well as imaging speed.[35]
High-performance, low-field scanners
High-performance, low-field MRI scanners are also an area of development.[10] These scanners operate at relatively low magnetic field strengths, such as 0.35 T or 0.55 T. Many RT-MRI acquisition sequences, such as bSSFP, experience significant off-resonance effects. Off-resonance effects increase linearly with B0 field strength, so minimizing B0 also minimizes these effects that can lead to artifacts and image distortion.[36] This allows for longer TRs, which then opens the door for a wider range of k-space sampling methods and sequence designs.[10] Finally, lower strength MRI scanners will reduce the dangers associated with heating of metallic implants and decrease the cost of MRI.[37]
References
- 1 2 S Zhang, M Uecker, D Voit, KD Merboldt, J Frahm (2010a) Real-time cardiovascular magnetic resonance at high temporal resolution: radial FLASH with nonlinear inverse reconstruction. J Cardiovasc Magn Reson 12, 39, doi:10.1186/1532-429X-12-39
- 1 2 M Uecker, S Zhang, D Voit, A Karaus, KD Merboldt, J Frahm (2010a) Real-time MRI at a resolution of 20 ms. NMR Biomed 23: 986-994, doi:10.1002/nbm.1585
- ↑ "Who Made America? | Innovators | Raymond Damadian". www.pbs.org. Retrieved 2022-12-09.
- ↑ "National Inventors Hall of Fame Inductee and MRI Inventor Peter Mansfield". www.invent.org. Retrieved 2022-12-09.
- ↑ Twieg, D. B. (1983). "The k-trajectory formulation of the NMR imaging process with applications in analysis and synthesis of imaging methods". Medical Physics. 10 (5): 610–621. Bibcode:1983MedPh..10..610T. doi:10.1118/1.595331. ISSN 0094-2405. PMID 6646065.
- ↑ "Quick history of the MRI | Two Views". two-views.com. Retrieved 2022-12-09.
- ↑ Sodickson, D. K.; Manning, W. J. (October 1997). "Simultaneous acquisition of spatial harmonics (SMASH): fast imaging with radiofrequency coil arrays". Magnetic Resonance in Medicine. 38 (4): 591–603. doi:10.1002/mrm.1910380414. ISSN 0740-3194. PMID 9324327. S2CID 17505246.
- ↑ Pruessmann, K. P.; Weiger, M.; Scheidegger, M. B.; Boesiger, P. (November 1999). "SENSE: sensitivity encoding for fast MRI". Magnetic Resonance in Medicine. 42 (5): 952–962. doi:10.1002/(SICI)1522-2594(199911)42:5<952::AID-MRM16>3.0.CO;2-S. ISSN 0740-3194. PMID 10542355. S2CID 16046989.
- ↑ Griswold, Mark A.; Jakob, Peter M.; Heidemann, Robin M.; Nittka, Mathias; Jellus, Vladimir; Wang, Jianmin; Kiefer, Berthold; Haase, Axel (June 2002). "Generalized autocalibrating partially parallel acquisitions (GRAPPA)". Magnetic Resonance in Medicine. 47 (6): 1202–1210. doi:10.1002/mrm.10171. ISSN 0740-3194. PMID 12111967. S2CID 14724155.
- 1 2 3 4 5 6 7 8 9 Nayak, Krishna S.; Lim, Yongwan; Campbell‐Washburn, Adrienne E.; Steeden, Jennifer (January 2022). "Real‐Time Magnetic Resonance Imaging". Journal of Magnetic Resonance Imaging. 55 (1): 81–99. doi:10.1002/jmri.27411. ISSN 1053-1807. PMC 8435094. PMID 33295674.
- ↑ "Gradient Echo (GRE)". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ "Gradient specifications". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ "Radial sampling". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ Poustchi-Amin, Mehdi; Mirowitz, Scott A.; Brown, Jeffrey J.; McKinstry, Robert C.; Li, Tao (2001-05-01). "Principles and Applications of Echo-planar Imaging: A Review for the General Radiologist". RadioGraphics. 21 (3): 767–779. doi:10.1148/radiographics.21.3.g01ma23767. ISSN 0271-5333. PMID 11353123.
- ↑ "Parallel Imaging (PI)". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ Cohen MS (2001). "Real-time functional magnetic resonance imaging". Methods. 25 (2): 201–220. doi:10.1006/meth.2001.1235. PMID 11812206.
- ↑ J Frahm, A Haase, W Hänicke, KD Merboldt, D Matthaei (1985) Hochfrequenz-Impuls und Gradienten-Impuls-Verfahren zur Aufnahme von schnellen NMR-Tomogrammen unter Benutzung von Gradientenechos. German Patent Application P 35 04 734.8, February 12, 1985
- ↑ J Frahm, A Haase, D Matthaei (1986) Rapid NMR imaging of dynamic processes using the FLASH technique. Magn Reson Med 3:321-327 doi:10.1002/mrm.1910030217
- ↑ S Zhang, KT Block KT, J Frahm (2010b) Magnetic resonance imaging in real time: Advances using radial FLASH. J Magn Reson Imag 31: 101-109, doi:10.1002/jmri.21987
- ↑ M Uecker, T Hohage, KT Block, J Frahm (2008) Image reconstruction by regularized nonlinear inversion – Joint estimation of coil sensitivities and image content. Magn Reson Med 60: 674-682, doi:10.1002/mrm.21691
- ↑ M Uecker, S Zhang, J Frahm (2010b) Nonlinear inverse reconstruction for real-time MRI of the human heart using undersampled radial FLASH. Magn Reson Med 63: 1456-1462, doi:10.1002/mrm.22453
- 1 2 3 Bieri, Oliver; Scheffler, Klaus (July 2013). "Fundamentals of balanced steady state free precession MRI: Fundamentals of Balanced SSFP MRI". Journal of Magnetic Resonance Imaging. 38 (1): 2–11. doi:10.1002/jmri.24163. PMID 23633246. S2CID 23442745.
- 1 2 "SENSE/ASSET?". Questions and Answers in MRI. Retrieved 2022-12-09.
- 1 2 "GRAPPA/ARC?". Questions and Answers in MRI. Retrieved 2022-12-09.
- 1 2 "Parallel Imaging (PI): noise". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ V Wedeen; A Crawley; R Weisskoff; G Holmvang & MS Cohen (1990). "Real time MR imaging of structured fluid flow". Society for Magnetic Resonance in Medicine: 164.
- 1 2 3 Laubrock, Kerstin; von Loesch, Thassilo; Steinmetz, Michael; Lotz, Joachim; Frahm, Jens; Uecker, Martin; Unterberg-Buchwald, Christina (2022-01-01). "Imaging of arrhythmia: Real-time cardiac magnetic resonance imaging in atrial fibrillation". European Journal of Radiology Open. 9: 100404. doi:10.1016/j.ejro.2022.100404. ISSN 2352-0477. PMC 8899235. PMID 35265735.
- ↑ I Uyanik, P Lindner, D Shah, N Tsekos I Pavlidis (2013) Applying a Level Set Method for Resolving Physiologic Motions in Free-Breathing and Non-gated Cardiac MRI. FIMH, 2013, "Computational Physiology Lab" (PDF). Retrieved 2013-10-01.
- ↑ S Zhang, N Gersdorff, J Frahm (2011) Real-Time Magnetic Resonance Imaging of Temporomandibular Joint Dynamics. The Open Medical Imaging Journal, 2011, 5, 1-7, "Real-Time Magnetic Resonance Imaging of Temporomandibular Joint Dynamics" (PDF). Archived from the original (PDF) on 2012-09-26. Retrieved 2011-09-16.
- ↑ Boutin RD, Buonocore MH, Immerman I, Ashwell Z, Sonico GJ, Szabo RM and Chaudhari AJ (2013) Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion—Initial Observations. PLoS ONE 8(12): e84004. doi:10.1371/journal.pone.0084004
- ↑ Niebergall A, Zhang S, Kunay E, Keydana G, Job M, et al. Real-time MRI of Speaking at a Resolution of 33 ms: Undersampled Radial FLASH with Nonlinear Inverse Reconstruction. Magn Reson Med 2010, doi:10.1002/mrm.24276.
- ↑ Zhang S, Olthoff A and Frahm J. Real-time magnetic resonance imaging of normal swallowing. J Magn Reson Imaging 2011;35:1372-1379. doi:10.1002/jmri.23591.
- ↑ Zhang, Bei; Sodickson, Daniel K.; Cloos, Martijn A. (August 2018). "A high-impedance detector-array glove for magnetic resonance imaging of the hand". Nature Biomedical Engineering. 2 (8): 570–577. doi:10.1038/s41551-018-0233-y. ISSN 2157-846X. PMC 6405230. PMID 30854251.
- ↑ "Actively shielded gradients". Questions and Answers in MRI. Retrieved 2022-12-09.
- 1 2 Gassenmaier, Sebastian; Küstner, Thomas; Nickel, Dominik; Herrmann, Judith; Hoffmann, Rüdiger; Almansour, Haidara; Afat, Saif; Nikolaou, Konstantin; Othman, Ahmed E. (2021-11-24). "Deep Learning Applications in Magnetic Resonance Imaging: Has the Future Become Present?". Diagnostics. 11 (12): 2181. doi:10.3390/diagnostics11122181. ISSN 2075-4418. PMC 8700442. PMID 34943418.
- ↑ "Off resonance pulses". Questions and Answers in MRI. Retrieved 2022-12-09.
- ↑ Campbell-Washburn, Adrienne E.; Ramasawmy, Rajiv; Restivo, Matthew C.; Bhattacharya, Ipshita; Basar, Burcu; Herzka, Daniel A.; Hansen, Michael S.; Rogers, Toby; Bandettini, W. Patricia; McGuirt, Delaney R.; Mancini, Christine; Grodzki, David; Schneider, Rainer; Majeed, Waqas; Bhat, Himanshu (November 2019). "Opportunities in Interventional and Diagnostic Imaging by Using High-Performance Low-Field-Strength MRI". Radiology. 293 (2): 384–393. doi:10.1148/radiol.2019190452. ISSN 1527-1315. PMC 6823617. PMID 31573398.