| Turn | |
|---|---|
 Counterclockwise rotations about the center point where a complete rotation corresponds to an angle of rotation of 1 turn. | |
| General information | |
| Unit of | Plane angle |
| Symbol | tr, pla, rev, cyc |
| Conversions | |
| 1 tr in ... | ... is equal to ... |
| radians | 2π rad ≈ 6.283185307... rad |
| milliradians | 2000π mrad ≈ 6283.185307... mrad |
| degrees | 360° |
| gradians | 400g |
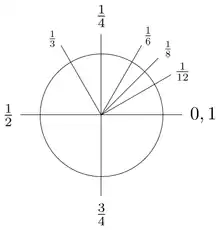
One turn (symbol tr or pla) is a unit of plane angle measurement equal to 2π radians, 360 degrees or 400 gradians. Thus it is the angular measure subtended by a complete circle at its center.
Subdivisions of a turn include half-turns and quarter-turns, spanning a semicircle and a right angle, respectively; metric prefixes can also be used as in, e.g., centiturns (ctr), milliturns (mtr), etc.
As an angular unit, one turn also corresponds to one cycle (symbol cyc or c)[1] or to one revolution (symbol rev or r).[2]
In the ISQ, an arbitrary "number of turns" (also known as "number of revolutions" or "number of cycles") is formalized as a dimensionless quantity called rotation, defined as the ratio of a given angle and the full turn.
Common related units of frequency are cycles per second (cps) and revolutions per minute (rpm).[lower-alpha 1]
History
The word turn originates via Latin and French from the Greek word τόρνος (tórnos – a lathe).
In 1697, David Gregory used π/ρ (pi over rho) to denote the perimeter of a circle (i.e., the circumference) divided by its radius.[3][4] However, earlier in 1647, William Oughtred had used δ/π (delta over pi) for the ratio of the diameter to perimeter. The first use of the symbol π on its own with its present meaning (of perimeter divided by diameter) was in 1706 by the Welsh mathematician William Jones.[5] Euler adopted the symbol with that meaning in 1737, leading to its widespread use.
Percentage protractors have existed since 1922,[6] but the terms centiturns, milliturns and microturns were introduced much later by the British astronomer Fred Hoyle in 1962.[7][8] Some measurement devices for artillery and satellite watching carry milliturn scales.[9][10]
Unit symbols
The German standard DIN 1315 (March 1974) proposed the unit symbol "pla" (from Latin: plenus angulus 'full angle') for turns.[11][12] Covered in DIN 1301-1 (October 2010), the so-called Vollwinkel ('full angle') is not an SI unit. However, it is a legal unit of measurement in the EU[13][14] and Switzerland.[15]
The scientific calculators HP 39gII and HP Prime support the unit symbol "tr" for turns since 2011 and 2013, respectively. Support for "tr" was also added to newRPL for the HP 50g in 2016, and for the hp 39g+, HP 49g+, HP 39gs, and HP 40gs in 2017.[16][17] An angular mode TURN was suggested for the WP 43S as well,[18] but the calculator instead implements "MULπ" (multiples of π) as mode and unit since 2019.[19][20]
Subdivisions
A turn can be divided in 100 centiturns or 1000 milliturns, with each milliturn corresponding to an angle of 0.36°, which can also be written as 21′ 36″.[7][8] A protractor divided in centiturns is normally called a "percentage protractor".
Binary fractions of a turn are also used. Sailors have traditionally divided a turn into 32 compass points, which implicitly have an angular separation of 1/32 turn. The binary degree, also known as the binary radian (or brad), is 1/256 turn.[21] The binary degree is used in computing so that an angle can be represented to the maximum possible precision in a single byte. Other measures of angle used in computing may be based on dividing one whole turn into 2n equal parts for other values of n.[22]
The notion of turn is commonly used for planar rotations.
| Submultiples | Multiples | ||||
|---|---|---|---|---|---|
| Value | SI symbol | Name | Value | SI symbol | Name |
| 10−1 tr | dtr | deciturn | 101 tr | datr | decaturn |
| 10−2 tr | ctr | centiturn | 102 tr | htr | hectoturn |
| 10−3 tr | mtr | milliturn | 103 tr | ktr | kiloturn |
| 10−6 tr | μtr | microturn | 106 tr | Mtr | megaturn |
| 10−9 tr | ntr | nanoturn | 109 tr | Gtr | gigaturn |
| 10−12 tr | ptr | picoturn | 1012 tr | Ttr | teraturn |
| 10−15 tr | ftr | femtoturn | 1015 tr | Ptr | petaturn |
| 10−18 tr | atr | attoturn | 1018 tr | Etr | exaturn |
| 10−21 tr | ztr | zeptoturn | 1021 tr | Ztr | zettaturn |
| 10−24 tr | ytr | yoctoturn | 1024 tr | Ytr | yottaturn |
| 10−27 tr | rtr | rontoturn | 1027 tr | Rtr | ronnaturn |
| 10−30 tr | qtr | quectoturn | 1030 tr | Qtr | quettaturn |
Unit conversion


One turn is equal to 2π (≈ 6.283185307179586)[23] radians, 360 degrees, or 400 gradians.
| Turns | Radians | Degrees | Gradians | |
|---|---|---|---|---|
| 0 turn | 0 rad | 0° | 0g | |
| 1/72 turn | 𝜏/72 rad[lower-alpha 2] | π/36 rad | 5° | 5+5/9g |
| 1/24 turn | 𝜏/24 rad | π/12 rad | 15° | 16+2/3g |
| 1/16 turn | 𝜏/16 rad | π/8 rad | 22.5° | 25g |
| 1/12 turn | 𝜏/12 rad | π/6 rad | 30° | 33+1/3g |
| 1/10 turn | 𝜏/10 rad | π/5 rad | 36° | 40g |
| 1/8 turn | 𝜏/8 rad | π/4 rad | 45° | 50g |
| 1/2π turn | 1 rad | c. 57.3° | c. 63.7g | |
| 1/6 turn | 𝜏/6 rad | π/3 rad | 60° | 66+2/3g |
| 1/5 turn | 𝜏/5 rad | 2π/5 rad | 72° | 80g |
| 1/4 turn | 𝜏/4 rad | π/2 rad | 90° | 100g |
| 1/3 turn | 𝜏/3 rad | 2π/3 rad | 120° | 133+1/3g |
| 2/5 turn | 2𝜏/5 rad | 4π/5 rad | 144° | 160g |
| 1/2 turn | 𝜏/2 rad | π rad | 180° | 200g |
| 3/4 turn | 3𝜏/4 rad | 3π/2 rad | 270° | 300g |
| 1 turn | 𝜏 rad | 2π rad | 360° | 400g |
Proposals for a single letter to represent 2π

In 1746, Leonhard Euler first used the Greek letter pi to represent the circumference divided by the radius of a circle (i.e., π = 6.28...).[24]
In 2001, Robert Palais proposed using the number of radians in a turn as the fundamental circle constant instead of π, which amounts to the number of radians in half a turn, in order to make mathematics simpler and more intuitive. His proposal used a "π with three legs" symbol to denote the constant ().[25]

In 2008, Thomas Colignatus proposed the uppercase Greek letter theta, Θ, to represent 2π.[26] The Greek letter theta derives from the Phoenician and Hebrew letter teth, 𐤈 or ט, and it has been observed that the older version of the symbol, which means wheel, resembles a wheel with four spokes.[27] It has also been proposed to use the wheel symbol, teth, to represent the value 2π, and more recently a connection has been made among other ancient cultures on the existence of a wheel, sun, circle, or disk symbol—i.e. other variations of teth—as representation for 2π.[28]
In 2010, Michael Hartl proposed to use the Greek letter tau to represent the circle constant: τ = 2π. He offered two reasons. First, τ is the number of radians in one turn, which allows fractions of a turn to be expressed more directly: for instance, a 3/4 turn would be represented as 3τ/4 rad instead of 3π/2 rad. Second, τ visually resembles π, whose association with the circle constant is unavoidable.[29] Hartl's Tau Manifesto[30] gives many examples of formulas that are asserted to be clearer where τ is used instead of π,[31][32][33] such as a tighter association with the geometry of Euler's identity using eiτ = 1 instead of eiπ = −1.
Initially, neither of these proposals received widespread acceptance by the mathematical and scientific communities.[34] However, the use of τ has become more widespread,[35] for example:
- In 2012, the educational website Khan Academy began accepting answers expressed in terms of τ.[36]
- The constant τ is made available in the Google calculator, Desmos graphing calculator[37] and in several programming languages such as Python,[38][39] Raku,[40] Processing,[41] Nim,[42] Rust,[43] GDScript,[44] UE Blueprints,[45] Java,[46][47] and .NET.[48][49]
- It has also been used in at least one mathematical research article,[50] authored by the τ-promoter Peter Harremoës.[51]
The following table shows how various identities appear if τ = 2π was used instead of π.[52][25] For a more complete list, see List of formulae involving π.
| Formula | Using π | Using τ | Notes |
|---|---|---|---|
| Angle subtended by 1/4 of a circle | π/2 rad | τ/4 rad | τ/4 rad = 1/4 turn |
| Circumference C of a circle of radius r | C = 2πr | C = τr | |
| Area of a circle | A = πr2 | A = 1/2τr2 | The area of a sector of angle θ is A = 1/2θr2. |
| Area of a regular n-gon with unit circumradius | A = n/2 sin 2π/n | A = n/2 sin τ/n | |
| n-ball and n-sphere volume recurrence relation | Vn(r) = r/n Sn−1(r) Sn(r) = 2πr Vn−1(r) | Vn(r) = r/n Sn−1(r) Sn(r) = τr Vn−1(r) | V0(r) = 1 S0(r) = 2 |
| Cauchy's integral formula | |||
| Standard normal distribution | |||
| Stirling's approximation | |||
| Euler's identity | eiπ = −1 eiπ + 1 = 0 |
eiτ = 1 eiτ - 1 = 0 |
For any integer k, eikτ = 1 |
| nth roots of unity | |||
| Planck constant | ħ is the reduced Planck constant. | ||
| Angular frequency | |||












Examples of use
- As an angular unit, the turn is particularly useful in many applications, such as in connection with electromagnetic coils (e.g., transformers) and rotating objects. See also Winding number.
- Pie charts illustrate proportions of a whole as fractions of a turn. Each one percent is shown as an angle of one centiturn.[6]
In the ISQ/SI
| Rotation | |
|---|---|
Other names | number of revolutions, number of cycles, number of turns, number of rotations |
Common symbols | N |
| SI unit | Unitless |
| Dimension | 1 |
A concept related to the angular unit "turn" is the physical quantity rotation (symbol N) defined as number of revolutions:[53]
N is the number (not necessarily an integer) of revolutions, for example, of a rotating body about a given axis. Its value is given by:
- N=φ/2π rad
where φ denotes the measure of rotational displacement.
The above definition is part of the International System of Quantities (ISQ), formalized in the international standard ISO 80000-3 (Space and time),[53] and adopted in the International System of Units (SI).[54][55]
Rotation count or number of revolutions is a quantity of dimension one, resulting from a ratio of angles. It can be negative and also greater than 1 in modulus. The relationship between quantity rotation, N, and unit turns, tr, can be expressed as:
- N=φ/tr={φ}tr
where {φ}tr is the numerical value of the angle φ in units of turns (see Physical quantity#Components).
In the ISQ/SI, rotation is used to derive rotational frequency, n=dN/dt, with SI base unit of reciprocal seconds (s-1); common related units of frequency are hertz (Hz), cycles per second (cps), and revolutions per minute (rpm).
| Revolution | |
|---|---|
| Unit of | Rotation |
| Symbol | rev, r, cyc, c |
| Conversions | |
| 1 rev in ... | ... is equal to ... |
| Base units | 1 |
The superseded version ISO 80000-3:2006 defined "revolution" as a special name for the dimensionless unit "one",[lower-alpha 3] which also received other special names, such as the radian.[lower-alpha 4] Despite their dimensional homogeneity, these two specially named dimensionless units are applicable for non-comparable kinds of quantity: rotation and angle, respectively.[57] "Cycle" is also mentioned in ISO 80000-3, in the definition of period.[lower-alpha 5]
See also
- Ampere-turn
- Hertz (modern) or Cycle per second (older)
- Angle of rotation
- Revolutions per minute
- Repeating circle
- Spat (angular unit) – the solid angle counterpart of the turn, equivalent to 4π steradians.
- Unit interval
- Divine Proportions: Rational Trigonometry to Universal Geometry
- Modulo operation
- Twist (mathematics)
Notes
- ↑ The angular unit terms "cycles" and "revolutions" are also used, ambiguously, as shorter versions of the related frequency units.
- ↑ In this table, 𝜏 denotes 2π.
- ↑ "The special name revolution, symbol r, for this unit [name 'one', symbol '1'] is widely used in specifications on rotating machines."[56]
- ↑ "Measurement units of quantities of dimension one are numbers. In some cases, these measurement units are given special names, e.g. radian..."[56]
- ↑ "3-14) period duration, period: duration (item 3‑9) of one cycle of a periodic event"[53]
References
- ↑ Fitzpatrick, Richard (2021). Newtonian Dynamics: An Introduction. CRC Press. p. 116. ISBN 978-1-000-50953-3. Retrieved 2023-04-25.
- ↑ Units & Symbols for Electrical & Electronic Engineers (PDF). London, UK: Institution of Engineering and Technology. 2016. Archived (PDF) from the original on 2023-07-18. Retrieved 2023-07-18. (1+iii+32+1 pages)
- ↑ Beckmann, Petr (1989) [1970]. A History of Pi. Barnes & Noble Publishing.
- ↑ Schwartzman, Steven (1994). The Words of Mathematics: An Etymological Dictionary of Mathematical Terms Used in English. The Mathematical Association of America. p. 165. ISBN 978-0-88385511-9.
- ↑ Veling, Anne (2001). "Pi through the ages". veling.nl. Archived from the original on 2009-07-02.
- 1 2 Croxton, Frederick E. (1922). "A Percentage Protractor - Designed for Use in the Construction of Circle Charts or "Pie Diagrams"". Journal of the American Statistical Association. Short Note. 18 (137): 108–109. doi:10.1080/01621459.1922.10502455.
- 1 2 Hoyle, Fred (1962). Chandler, M. H. (ed.). Astronomy (1 ed.). London, UK: Macdonald & Co. (Publishers) Ltd. / Rathbone Books Limited. LCCN 62065943. OCLC 7419446. (320 pages)
- 1 2 Klein, Herbert Arthur (2012) [1988, 1974]. "Chapter 8: Keeping Track of Time". The Science of Measurement: A Historical Survey (The World of Measurements: Masterpieces, Mysteries and Muddles of Metrology). Dover Books on Mathematics (corrected reprint of original ed.). Dover Publications, Inc. / Courier Corporation (originally by Simon & Schuster, Inc.). p. 102. ISBN 978-0-48614497-9. LCCN 88-25858. Retrieved 2019-08-06. (736 pages)
- ↑ Schiffner, Friedrich (1965). Wähnl, Maria Emma [in German] (ed.). "Bestimmung von Satellitenbahnen". Astronomische Mitteilungen der Urania-Sternwarte Wien (in German). Wien, Austria: Volksbildungshaus Wiener Urania. 8.
- ↑ Hayes, Eugene Nelson (1975) [1968]. Trackers of the Skies. History of the Smithsonian Satellite-tracking Program. Cambridge, Massachusetts, USA: Academic Press / Howard A. Doyle Publishing Company.
- ↑ German, Sigmar; Drath, Peter (2013-03-13) [1979]. Handbuch SI-Einheiten: Definition, Realisierung, Bewahrung und Weitergabe der SI-Einheiten, Grundlagen der Präzisionsmeßtechnik (in German) (1 ed.). Friedrich Vieweg & Sohn Verlagsgesellschaft mbH, reprint: Springer-Verlag. p. 421. ISBN 978-3-32283606-9. 978-3-528-08441-7, 978-3-32283606-9. Retrieved 2015-08-14.
- ↑ Kurzweil, Peter (2013-03-09) [1999]. Das Vieweg Einheiten-Lexikon: Formeln und Begriffe aus Physik, Chemie und Technik (in German) (1 ed.). Vieweg, reprint: Springer-Verlag. p. 403. doi:10.1007/978-3-322-92920-4. ISBN 978-3-32292920-4. 978-3-322-92921-1. Retrieved 2015-08-14.
- ↑ "Richtlinie 80/181/EWG - Richtlinie des Rates vom 20. Dezember 1979 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über die Einheiten im Meßwesen und zur Aufhebung der Richtlinie 71/354/EWG" (in German). 1980-02-15. Archived from the original on 2019-06-22. Retrieved 2019-08-06.
- ↑ "Richtlinie 2009/3/EG des Europäischen Parlaments und des Rates vom 11. März 2009 zur Änderung der Richtlinie 80/181/EWG des Rates zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über die Einheiten im Messwesen (Text von Bedeutung für den EWR)" (in German). 2009-03-11. Archived from the original on 2019-08-06. Retrieved 2019-08-06.
- ↑ "Art. 15 Einheiten in Form von nichtdezimalen Vielfachen oder Teilen von SI-Einheiten". Einheitenverordnung (in Swiss High German). Schweizerischer Bundesrat. 1994-11-23. 941.202. Archived from the original on 2019-05-10. Retrieved 2013-01-01.
{{cite book}}:|work=ignored (help) - ↑ Lapilli, Claudio Daniel (2016-05-11). "RE: newRPL: Handling of units". HP Museum. Archived from the original on 2017-08-10. Retrieved 2019-08-05.
- ↑ Lapilli, Claudio Daniel (2018-10-25). "Chapter 3: Units - Available Units - Angles". newRPL User Manual. Archived from the original on 2019-08-06. Retrieved 2019-08-07.
{{cite book}}:|work=ignored (help) - ↑ Paul, Matthias R. (2016-01-12) [2016-01-11]. "RE: WP-32S in 2016?". HP Museum. Archived from the original on 2019-08-05. Retrieved 2019-08-05.
[…] I'd like to see a TURN mode being implemented as well. TURN mode works exactly like DEG, RAD and GRAD (including having a full set of angle unit conversion functions like on the WP 34S), except for that a full circle doesn't equal 360 degree, 6.2831... rad or 400 gon, but 1 turn. (I […] found it to be really convenient in engineering/programming, where you often have to convert to/from other unit representations […] But I think it can also be useful for educational purposes. […]) Having the angle of a full circle normalized to 1 allows for easier conversions to/from a whole bunch of other angle units […]
- ↑ Bonin, Walter (2019) [2015]. WP 43S Owner's Manual (PDF). 0.12 (draft ed.). pp. 72, 118–119, 311. ISBN 978-1-72950098-9. Archived (PDF) from the original on 2023-07-18. Retrieved 2019-08-05. (314 pages)
- ↑ Bonin, Walter (2019) [2015]. WP 43S Reference Manual (PDF). 0.12 (draft ed.). pp. iii, 54, 97, 128, 144, 193, 195. ISBN 978-1-72950106-1. Archived (PDF) from the original on 2023-07-18. Retrieved 2019-08-05. (271 pages)
- ↑ "ooPIC Programmer's Guide - Chapter 15: URCP". ooPIC Manual & Technical Specifications - ooPIC Compiler Ver 6.0. Savage Innovations, LLC. 2007 [1997]. Archived from the original on 2008-06-28. Retrieved 2019-08-05.
- ↑ Hargreaves, Shawn [in Polish]. "Angles, integers, and modulo arithmetic". blogs.msdn.com. Archived from the original on 2019-06-30. Retrieved 2019-08-05.
- ↑ Sequence OEIS: A019692
- ↑ Euler, Leonhard (1746). Nova theoria lucis et colorum. Opuscula varii argumenti (in Latin). pp. 169–244.
- 1 2 Palais, Robert (2001). "Pi is Wrong" (PDF). The Mathematical Intelligencer. New York, USA: Springer-Verlag. 23 (3): 7–8. doi:10.1007/bf03026846. S2CID 120965049. Archived (PDF) from the original on 2019-07-18. Retrieved 2019-08-05.
- ↑ Cool, Thomas "Colignatus" (2008-07-18) [2008-04-08, 2008-05-06]. "Trig rerigged. Trigonometry reconsidered. Measuring angles in 'unit meter around' and using the unit radius functions Xur and Yur" (PDF). Archived from the original (PDF) on 2023-07-18. Retrieved 2023-07-18. (18 pages)
- ↑ Mann, Steve; Janzen, Ryan E.; Ali, Mir Adnan; Scourboutakos, Pete; Guleria, Nitin (22–24 October 2014). "Integral Kinematics (Time-Integrals of Distance, Energy, etc.) and Integral Kinesiology". Proceedings of the 2014 IEEE GEM. Toronto, Ontario, Canada: 627–629. S2CID 6462220. Retrieved 2023-07-18.
- ↑ Mann, Steve; Chen, Hongyu; Aylward, Graeme; Jorritsma, Megan; Mann, Christina; Defaz Poveda, Diego David; Pierce, Cayden; Lam, Derek; Stairs, Jeremy; Hermandez, Jesse; Li, Qiushi; Xiang, Yi Xin; Kanaan, Georges (June 2019). "Eye Itself as a Camera: Sensors, Integrity, and Trust". The 5th ACM Workshop on Wearable Systems and Applications (Keynote): 1–2. doi:10.1145/3325424.3330210. S2CID 189926593. Retrieved 2023-07-18.
- ↑ Hartl, Michael (2019-03-14) [2010-03-14]. "The Tau Manifesto". Archived from the original on 2019-06-28. Retrieved 2013-09-14.
- ↑ Hartl, Michael (2010-03-14). "The Tau Manifesto" (PDF). Archived (PDF) from the original on 2019-07-18. Retrieved 2019-08-05.
- ↑ Aron, Jacob (2011-01-08). "Michael Hartl: It's time to kill off pi". New Scientist. Interview. 209 (2794): 23. Bibcode:2011NewSc.209...23A. doi:10.1016/S0262-4079(11)60036-5.
- ↑ Landau, Elizabeth (2011-03-14). "On Pi Day, is 'pi' under attack?". cnn.com. CNN. Archived from the original on 2018-12-19. Retrieved 2019-08-05.
- ↑ Bartholomew, Randyn Charles (2014-06-25). "Let's Use Tau--It's Easier Than Pi - A growing movement argues that killing pi would make mathematics simpler, easier and even more beautiful". Scientific American. Archived from the original on 2019-06-18. Retrieved 2015-03-20.
- ↑ "Life of pi in no danger – Experts cold-shoulder campaign to replace with tau". Telegraph India. 2011-06-30. Archived from the original on 2013-07-13. Retrieved 2019-08-05.
- ↑ McMillan, Robert (2020-03-13). "For Math Fans, Nothing Can Spoil Pi Day—Except Maybe Tau Day". Wall Street Journal. ISSN 0099-9660. Retrieved 2020-05-21.
- ↑ "Happy Tau Day!". blog.khanacademy.org. 2012-06-28. Archived from the original on 2023-07-18. Retrieved 2020-12-19.
- ↑ "Supported Functions". help.desmos.com. Archived from the original on 2023-03-26. Retrieved 2023-03-21.
- ↑ Coghlan, Nick (2017-02-25). "PEP 628 -- Add math.tau". Python.org. Archived from the original on 2019-07-22. Retrieved 2019-08-05.
- ↑ "math — Mathematical functions". Python 3.7.0 documentation. Archived from the original on 2019-07-29. Retrieved 2019-08-05.
- ↑ "Perl 6 terms". Archived from the original on 2019-07-22. Retrieved 2019-08-05.
- ↑ "TAU". Processing. Archived from the original on 2019-07-22. Retrieved 2019-08-05.
- ↑ "math". Nim. Archived from the original on 2019-07-22. Retrieved 2019-08-05.
- ↑ "std::f64::consts::TAU - Rust". doc.rust-lang.org. Archived from the original on 2023-07-18. Retrieved 2020-10-09.
- ↑ "Constants @GDScript - Godot Engine (stable) documentation in English". Godot Docs.
- ↑ "Get TAU - Unreal Engine 5.2 Documentation". Unreal Engine Docs.
- ↑ Darcy, Joe. "JDK-8283136: Add constant for tau to Math and StrictMath". bugs.openjdk.org.
- ↑ "Math class". Java 19 documentation.
- ↑ John-H-K. "Add Math.Tau Pull Request #37517 · dotnet/Runtime". GitHub.
- ↑ "Math.Tau Field". .NET Reference Documentation.
- ↑ Harremoës, Peter (2017). "Bounds on tail probabilities for negative binomial distributions". Kybernetika. 52 (6): 943–966. arXiv:1601.05179. doi:10.14736/kyb-2016-6-0943. S2CID 119126029.
- ↑ Harremoës, Peter (2018-11-17). "Al-Kashi's constant τ" (PDF). Archived (PDF) from the original on 2019-07-22. Retrieved 2018-09-20.
- ↑ Abbott, Stephen (April 2012). "My Conversion to Tauism" (PDF). Math Horizons. 19 (4): 34. doi:10.4169/mathhorizons.19.4.34. S2CID 126179022. Archived (PDF) from the original on 2013-09-28.
- 1 2 3 "ISO 80000-3:2019 Quantities and units — Part 3: Space and time" (2 ed.). International Organization for Standardization. 2019. Retrieved 2019-10-23. (11 pages)
- ↑ Le Système international d’unités [The International System of Units] (PDF) (in French and English) (9th ed.), International Bureau of Weights and Measures, 2019, ISBN 978-92-822-2272-0
- ↑ Thompson, Ambler; Taylor, Barry N. (2020-03-04) [2009-07-02]. "The NIST Guide for the Use of the International System of Units, Special Publication 811" (2008 ed.). National Institute of Standards and Technology. Retrieved 2023-07-17.
- 1 2 "ISO 80000-3:2006". ISO. 2001-08-31. Retrieved 2023-04-25.
- ↑ "ISO 80000-1:2009(en) Quantities and units — Part 1: General". iso.org. Retrieved 2023-05-12.